Robot and charging pile butt joint method and device, robot and readable storage medium
A technology of a docking device and a charging pile, applied in the field of robots, can solve the problems of poor automatic recharging effect, difficulty in adjusting the docking position and attitude of the charging pile, and failure of recharging, and achieve the effect of improving the success rate of docking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
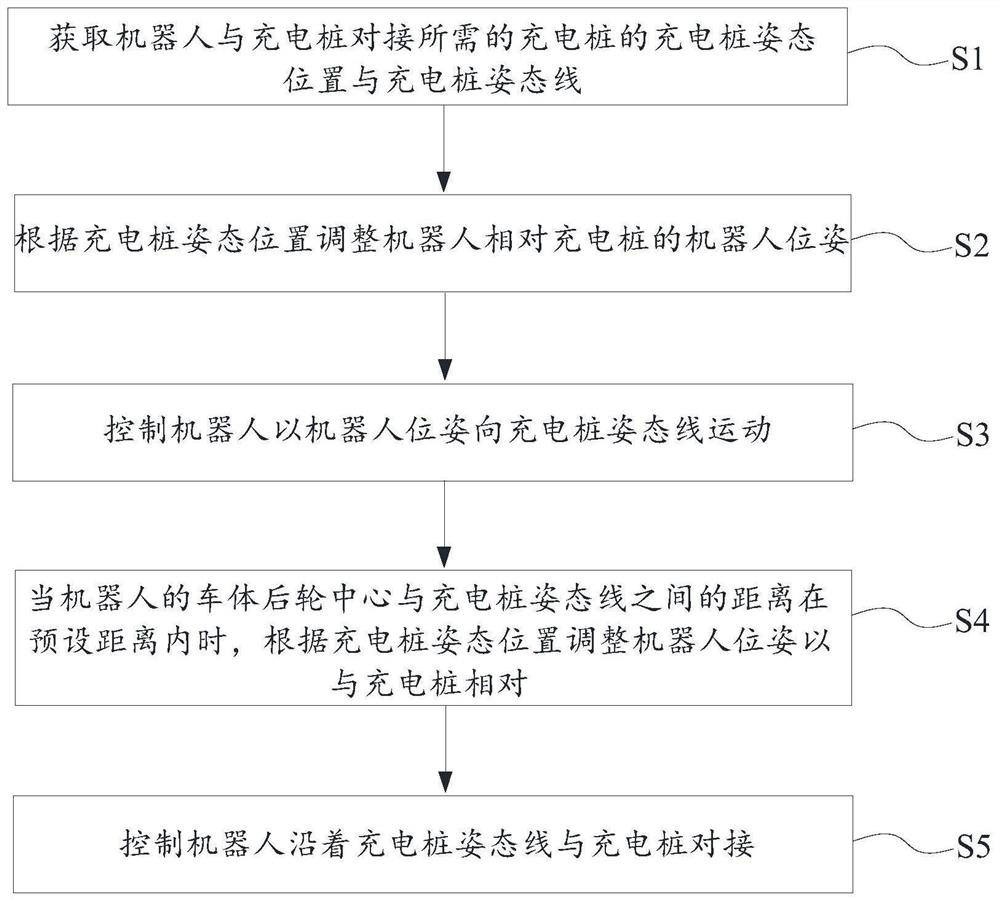
[0057] see figure 1 , the docking method of the robot and the charging pile in the embodiment of the present invention includes steps:
[0058] S1: Obtain the attitude position of the charging pile and the attitude line of the charging pile required for the docking between the robot and the charging pile;
[0059] S2: Adjust the robot pose relative to the charging pile according to the posture position of the charging pile;
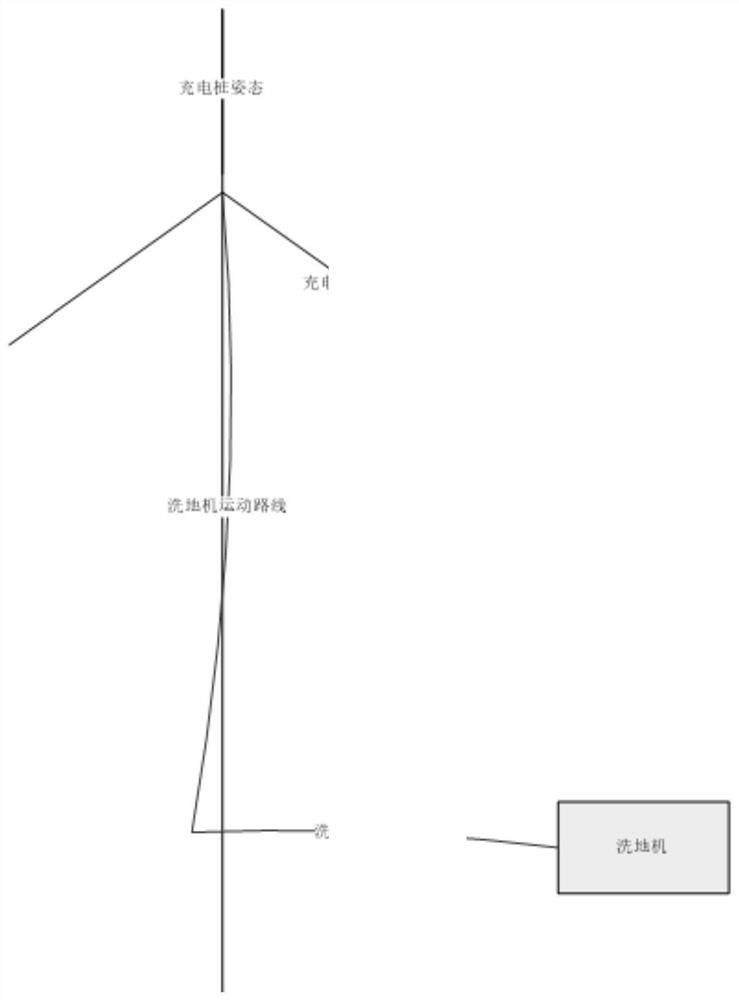
[0060] S3: Control the robot to move toward the charging pile posture line with the robot posture;
[0061] S4: When the distance between the rear wheel center of the robot body and the attitude line of the charging pile is within the preset distance, adjust the pose of the robot according to the attitude position of the charging pile to be opposite to the charging pile;
[0062] S5: Control the robot to dock with the charging pile along the attitude line of the charging pile.
[0063] The robot can be a device with certain intelligence and self-cleani...
Embodiment 2
[0077] Further, see Figure 4 , the posture position of the charging pile includes the posture angle and plane coordinates of the charging pile, and step S1 includes the steps:
[0078]S11: Obtain the plane coordinates of the charging pile;
[0079] S12: Calculate the docking distance between the robot and the charging pile and the attitude line of the charging pile according to the plane coordinates;
[0080] S13: Calculate the attitude angle between the robot and the charging pile according to the docking distance;
[0081] Among them, the attitude angle includes the first included angle, the second included angle, and the third included angle between the robot's laser radar, the midpoint of the robot's two rear wheels, and the robot's front wheel relative to the charging pile at the docking distance.
[0082] Please combine the description of how the robot obtains docking parameters in Example 1:
[0083] When the robot determines that there is a charging pile within a c...
Embodiment 3
[0088] Further, see Figure 5 , step S4 includes the steps of:
[0089] S41: When the distance between the robot and the attitude line of the charging pile is within the preset distance, use the first included angle, the second included angle, and the third included angle as the first input and the second input of the motion control in the PID algorithm respectively Quantity and the third input quantity, the output is used to control the steering angle of the robot steering;
[0090] S42: Adjust the pose of the robot according to the steering angle to be opposite to the charging pile.
[0091] It can be understood that in this embodiment of the invention, the movement trend of the robot is determined by the driving of the steering wheel, so the steering control of the steering wheel is the main factor affecting the docking success, and the robot is controlled to move to the charging pile until the distance between the robot and the attitude line of the charging pile is within...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More