

Underwater terminal docking system and method based on light vision guidance
An optical vision and terminal technology, applied in underwater operation equipment, control/adjustment system, image enhancement, etc., can solve problems such as unfavorable docking, low docking success rate, high collision risk, etc., to improve accuracy and robustness , the effect of reducing difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further explained in detail below in conjunction with the accompanying drawings and examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the invention.
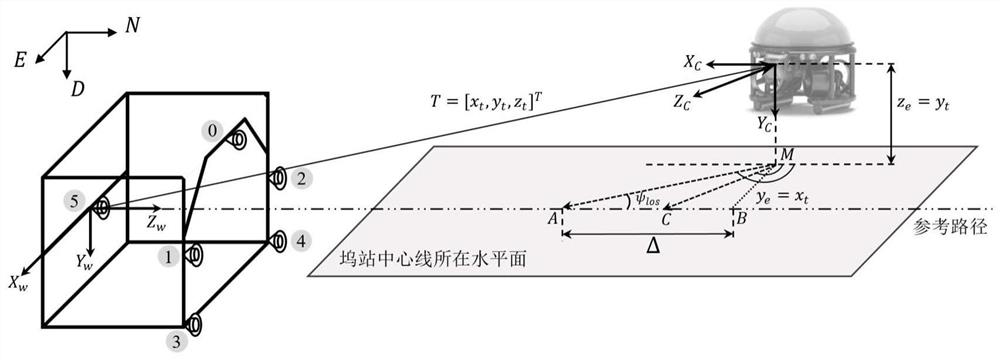
[0040] In order to achieve the above object, according to one aspect of the present invention, a set of underwater terminal docking recovery system based on optical vision guidance is provided, including: a specially designed underwater docking station equipped with a three-dimensional guiding light array, an autonomous underwater robot .
[0041] Such as figure 1 As shown, the underwater docking station adopts a frame design, and six artificially marked light sources are installed at specific positions to construct a three-dimensional guiding light array, and five light sources are distributed on the fro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More