Dynamics modeling method of six-axis industrial robot
A technology for industrial robot and dynamics modeling, applied in the field of dynamics modeling, can solve the problems of difficulty in modeling six-axis industrial robots, failing to meet the actual needs of dynamic modeling of six-axis industrial robots, etc., and achieve important practical performance and engineering value, the effect of simple calculation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
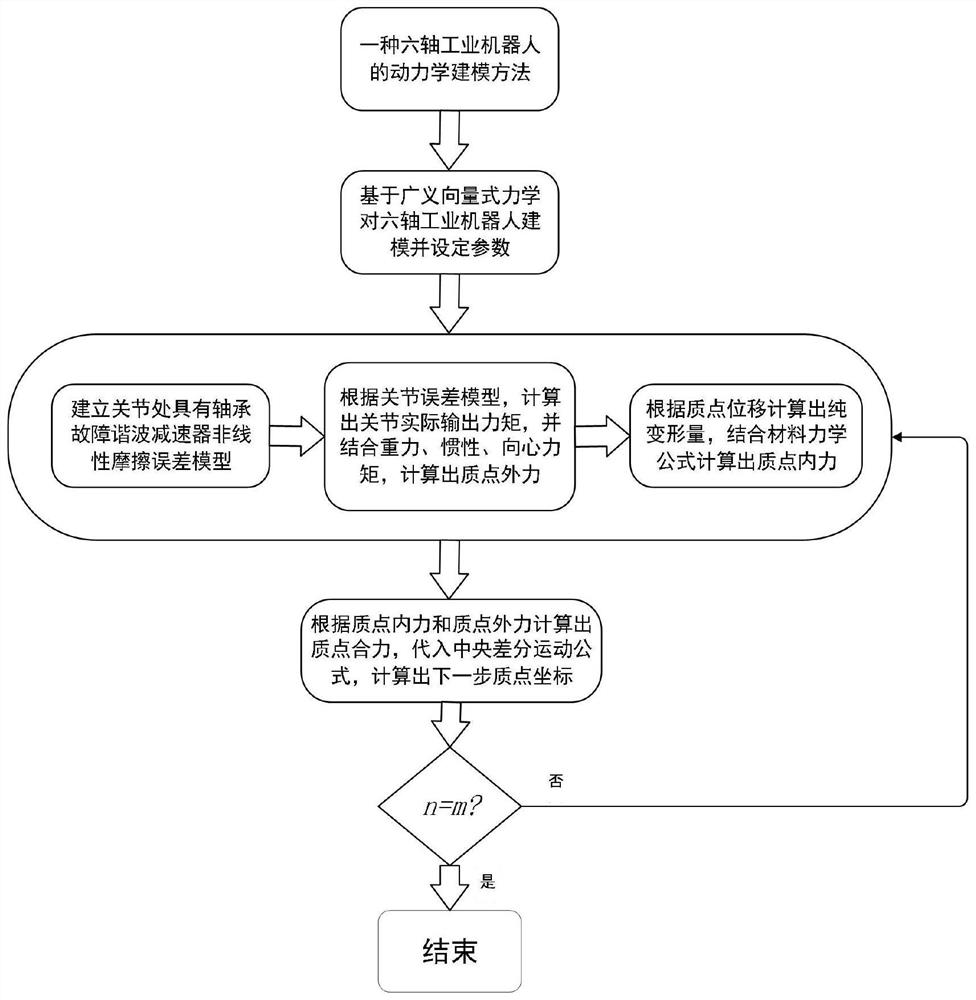
[0052] The modeling method of the present invention will be described in detail below with reference to the drawings and embodiments, but the protection scope of the present invention is not limited to the embodiments.
[0053] The first joint of the six-axis industrial robot is rotated, and the other joints are fixed and kept at the longest stretched posture in the horizontal plane as an example, and the dynamic modeling method involved in the present invention is used for specific implementation:
[0054] Step 1, set the basic parameters of the six-axis industrial robot:
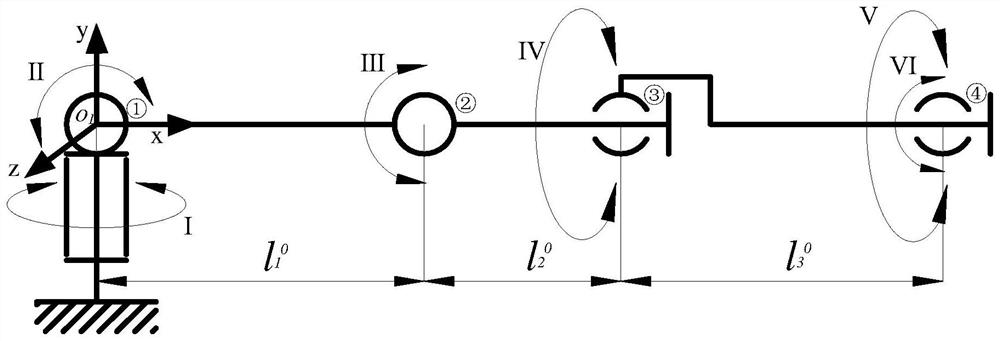
[0055] The dynamic modeling of the first joint motion of the six-axis industrial robot is carried out, and the model of the six-axis industrial robot is equivalent to four mass points and three bar elements without mass; the structure of the six-axis industrial robot is simple Figure such as figure 2 Shown: Serial numbers ① to ④ represent mass points 1, 2, 3, 4; and Respectively represent the origina...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com