

Robot ultrasonic sensor obstacle detection method and system
A technology of obstacle detection and sensors, applied in radio wave measurement systems, sound wave reradiation, instruments, etc., to avoid inaccurate estimates
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
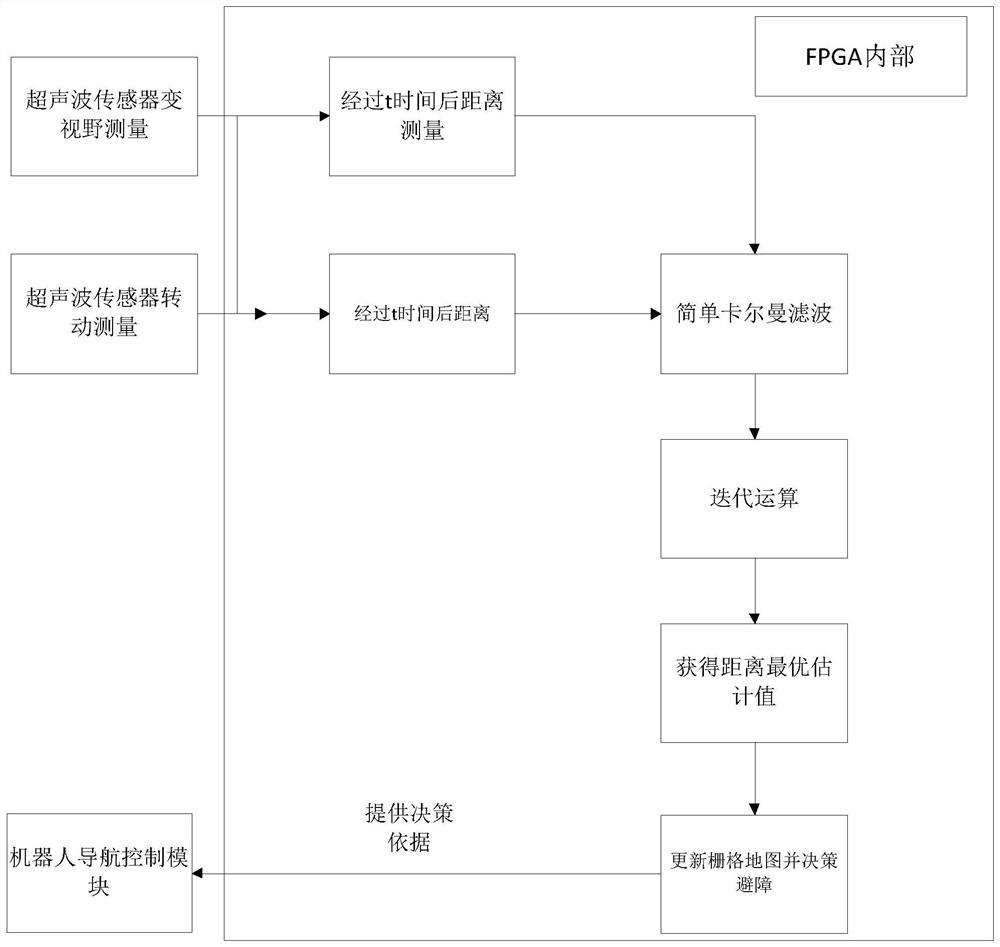
[0083] as attached figure 1 Shown, robot ultrasonic sensor obstacle detection method of the present invention, this method is to adopt the FPGA processor platform of robot to carry out real-time calculation and processing of data, adopts Verilog hardware description language to carry out digital logic design in FPGA interior; Specifically as follows:
[0084] S1. Ultrasonic sensor variable field of view measurement and ultrasonic sensor rotation measurement;
[0085] S2, distance measurement after t time;
[0086] S3, record the real-time distance value after t time;
[0087] S4. According to the Kalman filter algorithm, calculate and obtain the optimal estimate of the current distance value;
[0088] S5. Iterative operation to obtain the optimal estimated value of the distance;
[0089] S6. Updating the grid map and making a decision to avoid obstacles;
[0090] S7, FPGA processor platform provides decision-making basis to the robot navigation control module to realize pr...
Embodiment 2
[0118] The robot ultrasonic sensor obstacle detection system of the present invention, the system includes,
[0119] Field of view and rotation measurement module, used for ultrasonic sensor variable field of view measurement and ultrasonic sensor rotation measurement;
[0120] A distance measurement module, used for distance measurement after t time;
[0121] Recording module, for recording the real-time distance value after passing through t time;
[0122]The calculation module is used to calculate the optimal estimate of the current distance value according to the Kalman filter algorithm;
[0123] The iteration module is used for iterative operation to obtain the optimal estimated value of the distance;
[0124] The update module is used to update the grid map and make decision-making obstacle avoidance;
[0125] The push module is used for the FPGA processor platform to provide decision-making basis to the robot navigation control module, so as to realize the precise ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More