

Eight-propeller underwater robot control system based on RS485 bus
An underwater robot, RS485 technology, applied to underwater ships, underwater operating equipment, motor vehicles, etc., can solve problems such as complex conversion, complicated control process, and robot slippage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0029] The overall technical scheme of the eight propeller underwater robot control system based on the RS485 bus provided by the present invention
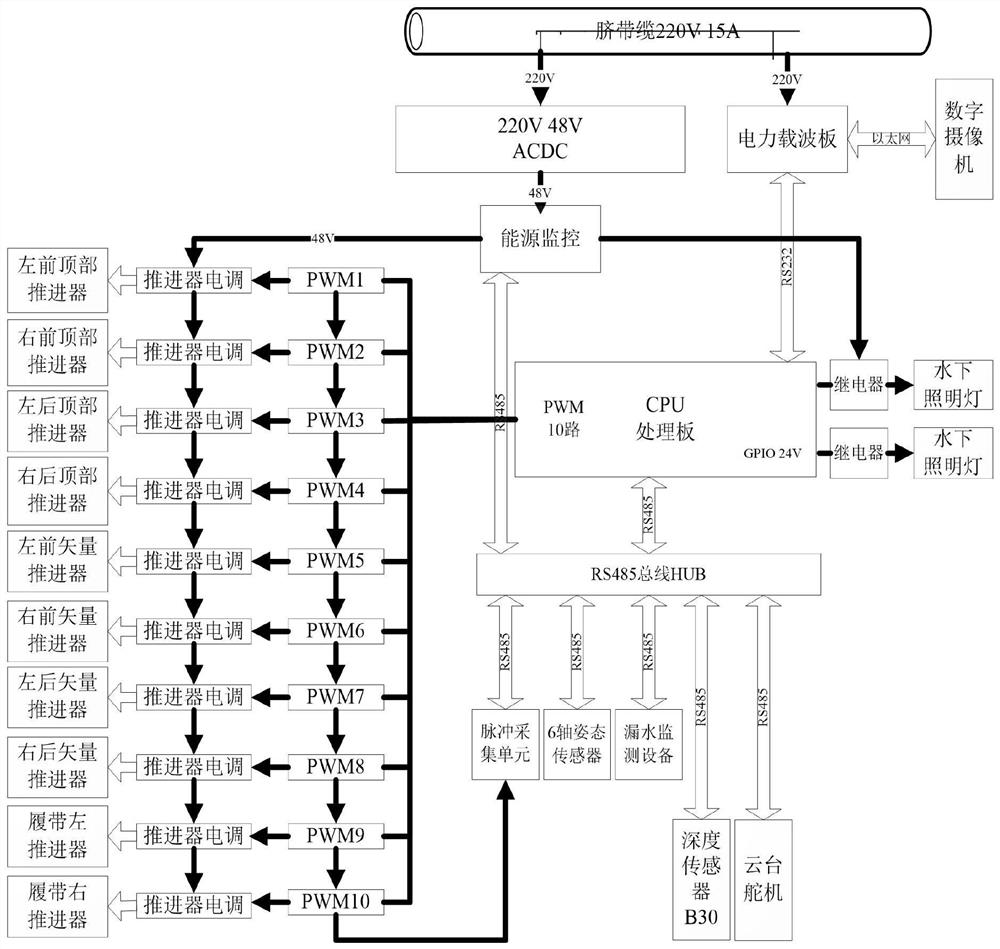
[0030] 4.1 Composition of the control system of the underwater robot
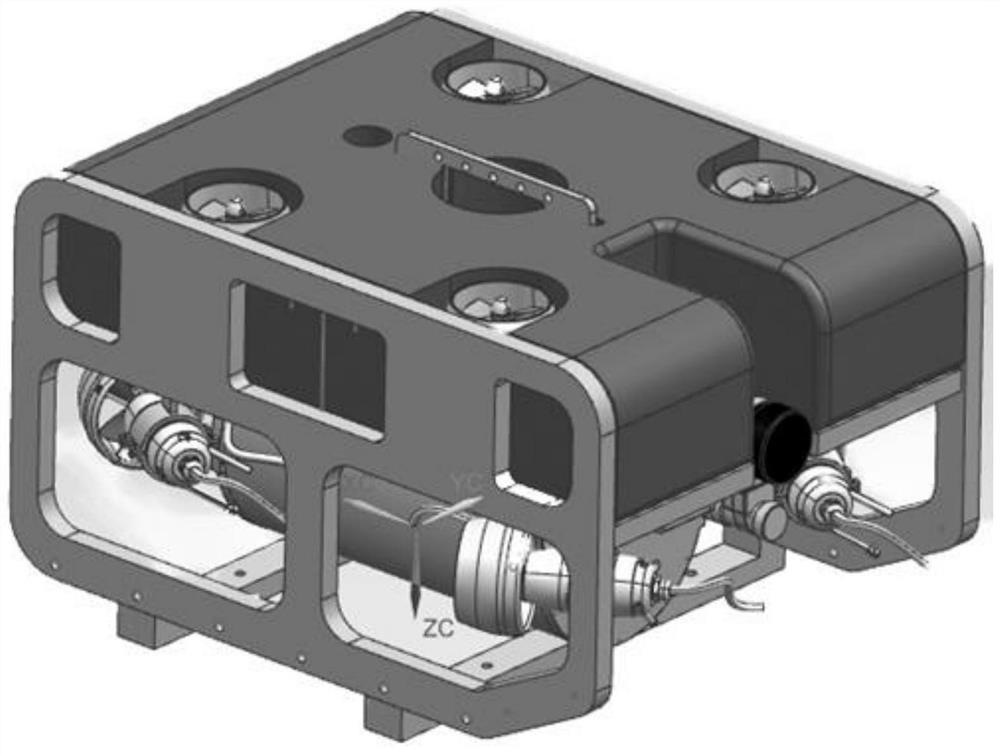
[0031] The control system is composed of RS485 control bus, integrated control computer, underwater thruster, sensor unit, power supply unit, lighting and image acquisition unit. Among them, the underwater thruster is controlled by the PWM signal sent by the integrated control computer, and the other unit devices are controlled by the RS485 communication bus. The integrated control computer is the core of the entire control system. The integrated control computer adopts the ARM embedded system, which is responsible for the output of the thruster PWM signal, the sending of the RS485 bus control command, the reception of the status data of the sensor unit, the output of the relay signal, and the transmission of image data. The composition of the underwater robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More