

A method for obtaining corresponding two-dimensional images through three-dimensional model mark points
A technology of two-dimensional images and three-dimensional models, applied in the field of three-dimensional modeling, can solve problems such as low efficiency, heavy workload, and inability to automatically adapt images
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0049] The existing 3D model obtained by scanning and reconstructing the target object has poor clarity, and if it is necessary to check its local position, it is impossible to directly obtain accurate image information. In order to solve this technical problem, by matching the high-definition two-dimensional image with the three-dimensional model, after clicking or zooming in on the three-dimensional model in the corresponding area, the two-dimensional image of the corresponding position can pop up, and by viewing a single frame or multiple frames of two-dimensional images to obtain the detailed information of this part.
[0050] However, since no automatic matching method is provided in the prior art, manual means are less efficient. Then, this embodiment provides a method, which can match the metadata of each frame of 2D image in the 2D image library according to the corresponding metadata of the selected point in the 3D model, so as to automatically obtain a more suitable ...
Embodiment 2
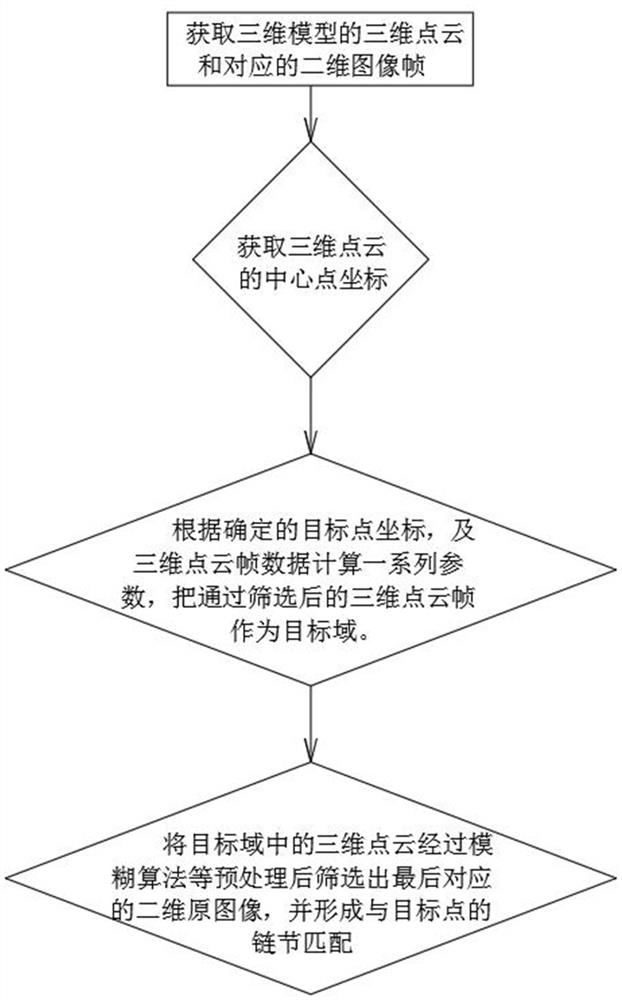
[0059] This embodiment discloses a method for obtaining a corresponding two-dimensional image through the marked points of the three-dimensional model, and processing is performed according to the corresponding three-dimensional model and the source file generating the three-dimensional model, wherein the source file includes a three-dimensional point cloud frame and a corresponding two-dimensional image; First obtain the coordinate data of any point on the 3D model corresponding to the selected point in the point cloud, and set the target threshold A; then determine the center pixel point set in the pixel point coordinate data of each frame of the 3D point cloud frame, and set the center pixel point The 3D point cloud frame whose average spatial distance D between the collection and the selected points in the 3D point cloud frame is less than the target threshold A is determined as the target domain; the 2D image corresponding to the 3D point cloud frame belonging to the target...
Embodiment 3
[0065] This embodiment discloses a method for obtaining a corresponding two-dimensional image through a three-dimensional model mark point, and the specific steps are as follows:
[0066] Firstly, the 3D model data is obtained, and the 3D model is a data model generated by a laser scanner, and its point cloud, the 3D point cloud frame obtained during scanning and the corresponding 2D image are proposed for processing.
[0067] Obtain the center pixel points of all 3D point cloud frames. If it cannot be obtained directly, obtain at least four pixel points closest to the theoretical center point to form the center pixel point set of each frame of 3D point cloud frame.
[0068] Then choose a point on the point cloud as the selected point, obtain the coordinate information of the selected point, calculate the space distance between the center pixel point of all 3D point cloud frames and the selected point, and calculate the center pixel of each frame of 3D point cloud frame The sp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More