Feature-based spatial hash continuous collision detection method
A technology of collision detection and space, which is applied in the directions of instruments, calculations, image data processing, etc., can solve the problems that there is no space hash continuous collision detection method, the reduction of BVH elimination efficiency, and the impact of collision detection performance, etc., so as to improve the elimination efficiency, Easy to optimize in parallel and realize the effect of parallel optimization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
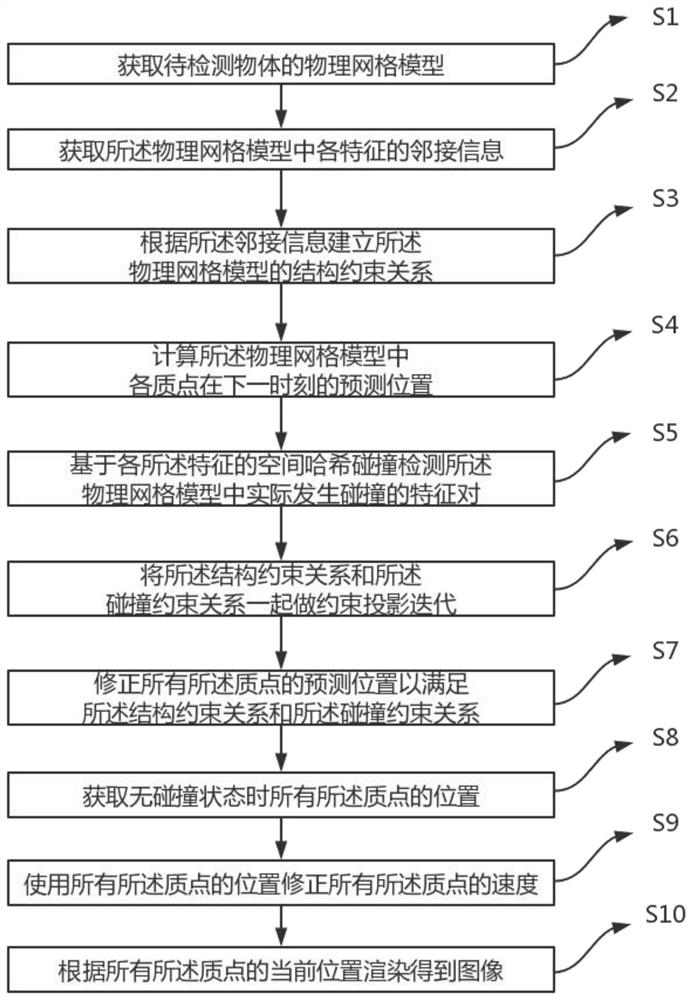
[0085] The present invention will be described in detail below in conjunction with specific embodiments and examples, and the advantages and various effects of the present invention will be presented more clearly. Those skilled in the art should understand that these specific implementations and examples are used to illustrate the present invention, not to limit the present invention.
[0086] Throughout the specification, unless otherwise specified, terms used herein should be understood as commonly used in the art. Therefore, unless otherwise defined, all technical and scientific terms used herein have the same meaning as commonly understood by one of ordinary skill in the art to which this invention belongs. In case of conflict, this specification shall take precedence.
[0087] Unless otherwise specified, various raw materials, reagents, instruments and equipment used in the present invention can be purchased from the market or prepared by existing methods.
[0088] Such...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More