

Object throwing-receiving robot system
A robot and object-receiving technology, which is applied in the field of parabolic-object-receiving robot system to achieve the optimal global path, improve the ability of autonomous obstacle avoidance, and search efficiently.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066]In order to make the objectives, technical solutions and advantages of the present invention, the present invention will be further described in detail below with reference to the embodiments. It should be understood that the specific embodiments described herein are merely intended to illustrate the invention and are not intended to limit the invention.
[0067]For problems in the prior art, the present invention provides a parabolic-receiving mechanic system, which will be described in detail below with reference to the accompanying drawings.
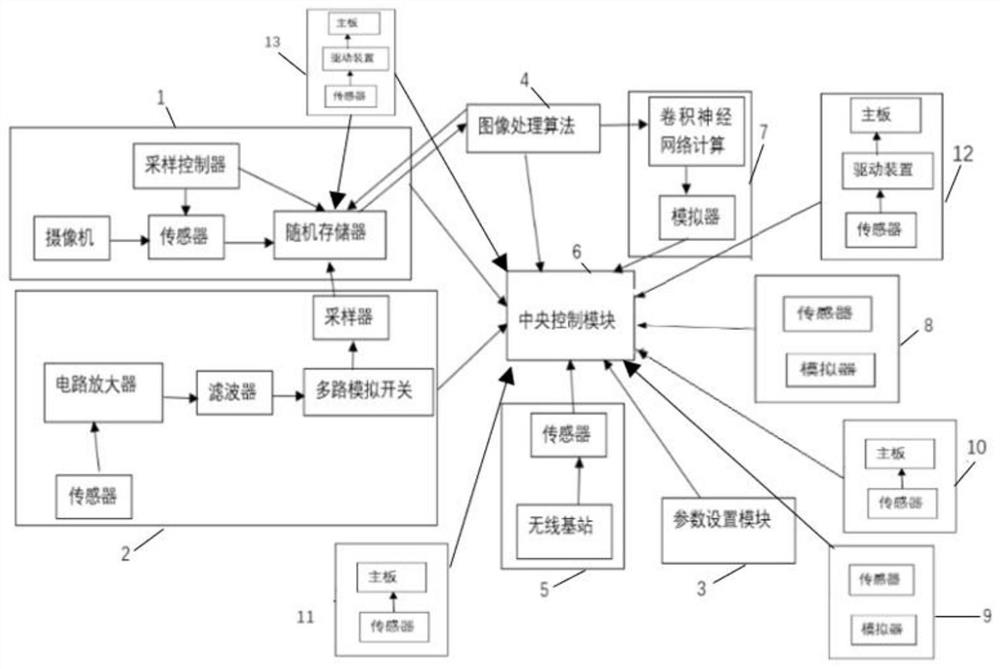
[0068]Such asfigure 1 As shown, the parabolic-receiving machinery system provided by the embodiment of the present invention includes:
[0069]Image acquisition module 1, data acquisition module 2, parameter setting module 3, image processing module 4, positioning module 5, central control module 6, predictive module 7, tetreat trajectory planning module 8, parabolic trajectory planning module 9, mechanical position adjustment Module 10, speed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More