

Pneumatic soft clamping hand with variable grabbing range and using method of pneumatic soft clamping hand
A clamping hand and software technology, applied in chucks, manipulators, manufacturing tools, etc., can solve the problems of limited grasping range, poor stability, and small application range of the clamping hand
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
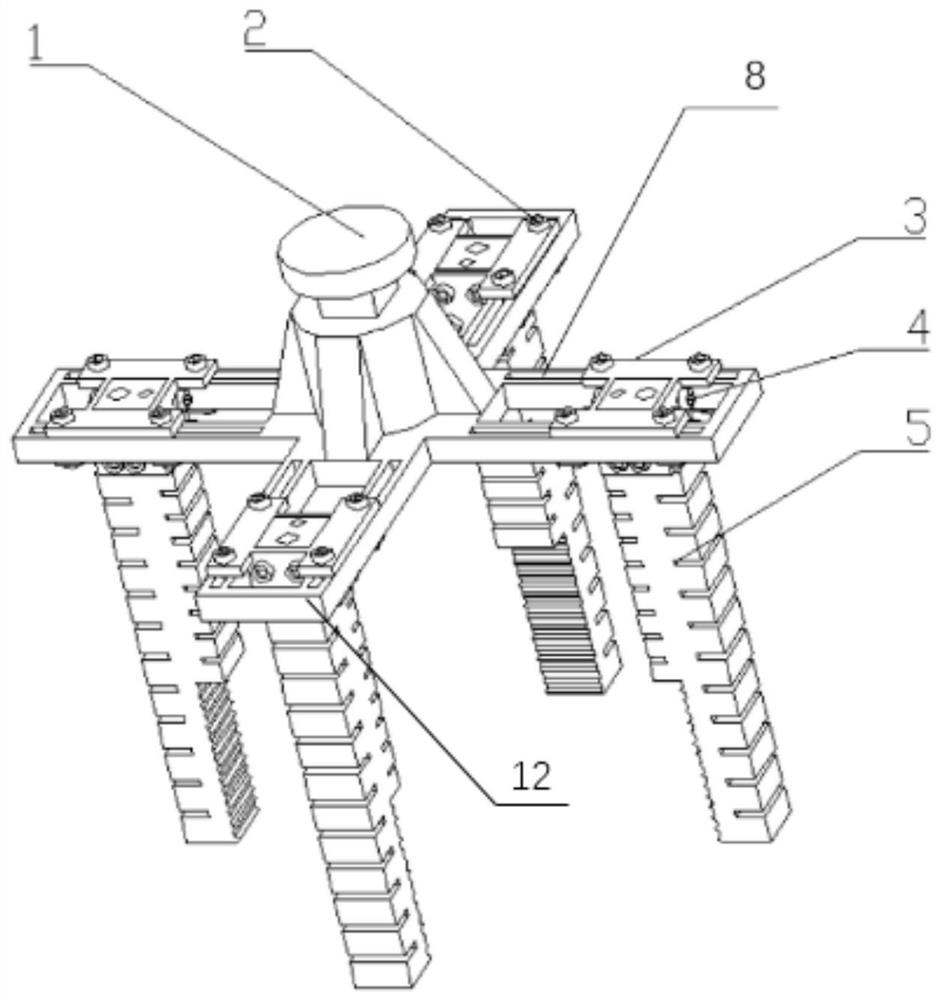
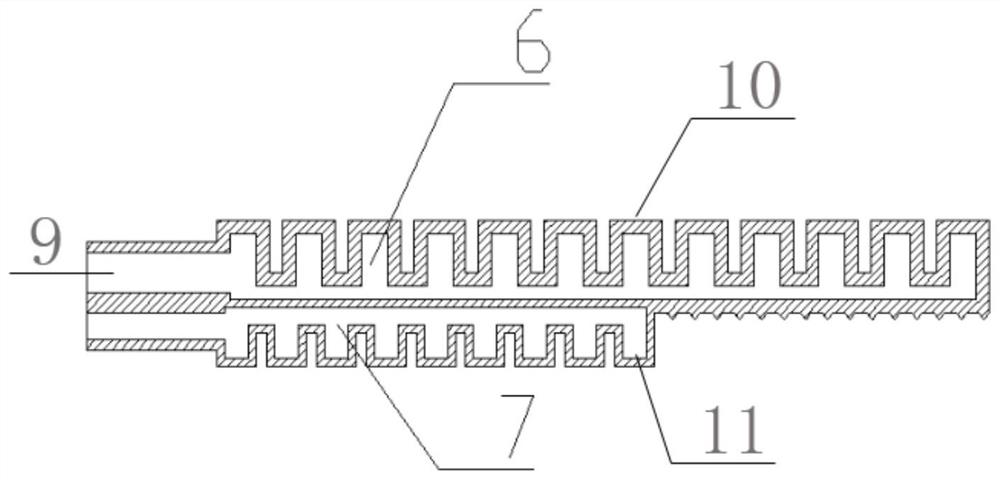
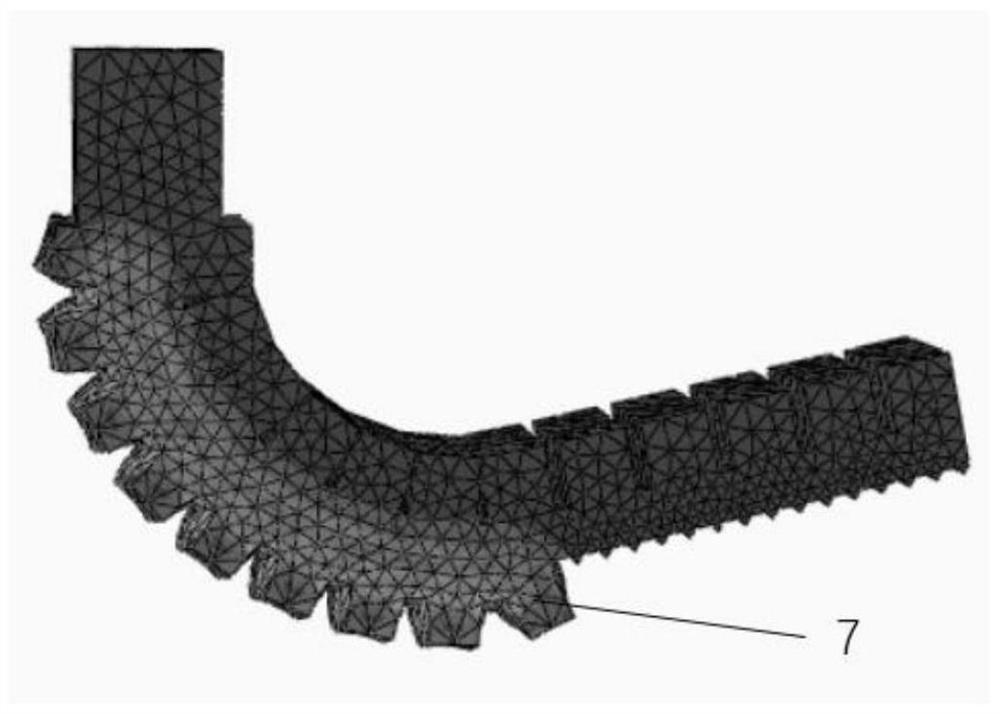
[0033] refer to Figure 1-Figure 2 , a pneumatic software clamping hand with a variable grasping range provided by the present invention, comprising: a finger support frame 1 and a soft finger 5 . There is a guide groove 8 on both sides of the extended end 12 of the support frame on the finger support frame 1; the finger connector 3 is used to connect the finger support frame 1 and the soft finger 5; the soft finger 5 is fixed by a thread 4 On the finger connector 3; the soft finger 5 is composed of a large chamber 6 and a small chamber 7, the large chamber 6 is composed of uniformly arranged large airbags 10, and the small chamber 7 is composed of uniformly arranged small airbags 11, The large chamber 6 and the small chamber 7 are not communicated with each other, and each has an air inlet 9.
[0034] Such as figure 1 and figure 2As shown...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More