

Special positioning scale for three-dimensional images, surgical navigation system and positioning method of surgical navigation system
A technology of three-dimensional images and positioning rulers, which is applied in the field of surgical positioning, can solve the problems of unfavorable accuracy, improve and increase the perspective of patients during operation time, and achieve the effects of wide applicability, convenient placement and adjustment, and high degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
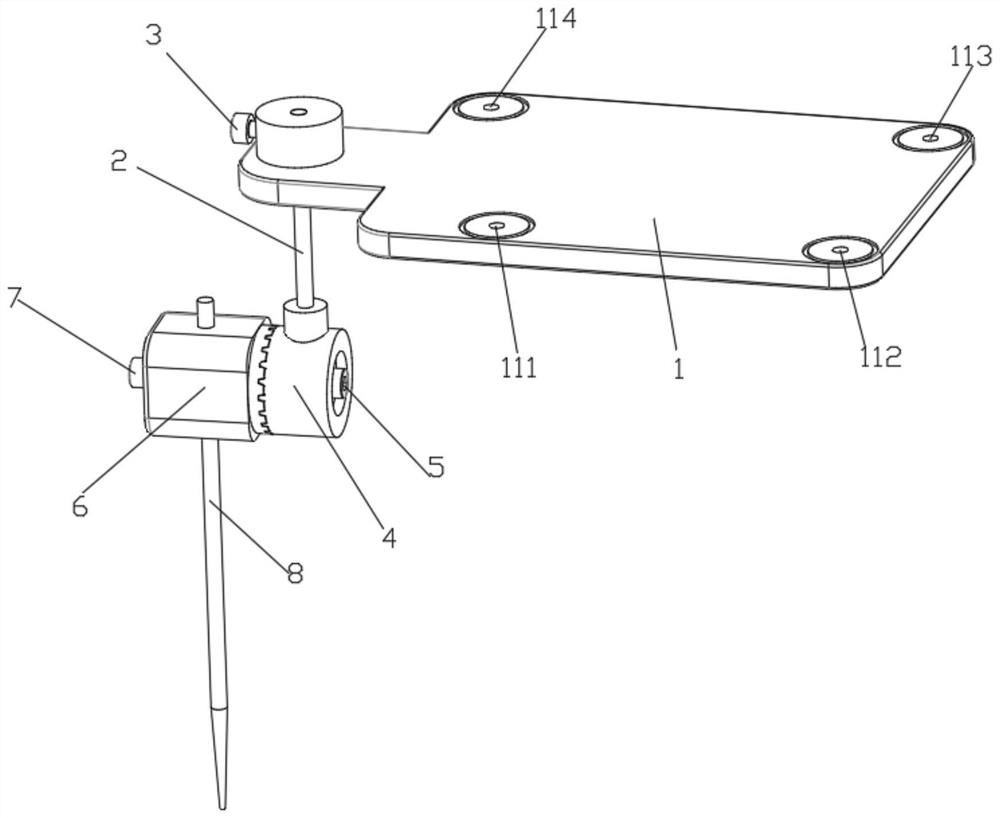
[0030] Such as figure 1 As shown, the present invention proposes a special positioning scale for three-dimensional images: including a calibration device 1, a base 6, a rotating part 4 that cooperates with the base, a calibration device connecting rod 2, and a calibration device for fastening the base and Kirschner wire Fastening screw one 7, one fastening screw two 5 for fastening the base and rotating parts and one fastening screw three 3 for fastening the calibrator and calibrator connecting rod.
[0031] One end of the calibrator 1 is connected to the calibrator connecting rod 2 to realize rotation around the calibrating device connecting rod 2 at any angle, and the surface of the calibrating device 1 is provided with 4 marking points 111, 112, 113 that are not on the same straight line , 114.
[0032] Further, the arrangement shape of each marking point 111 , 112 , 113 , 114 on the surface of the standardizer 1 is anisotropic (for example, the distance between any two ma...
Embodiment 2
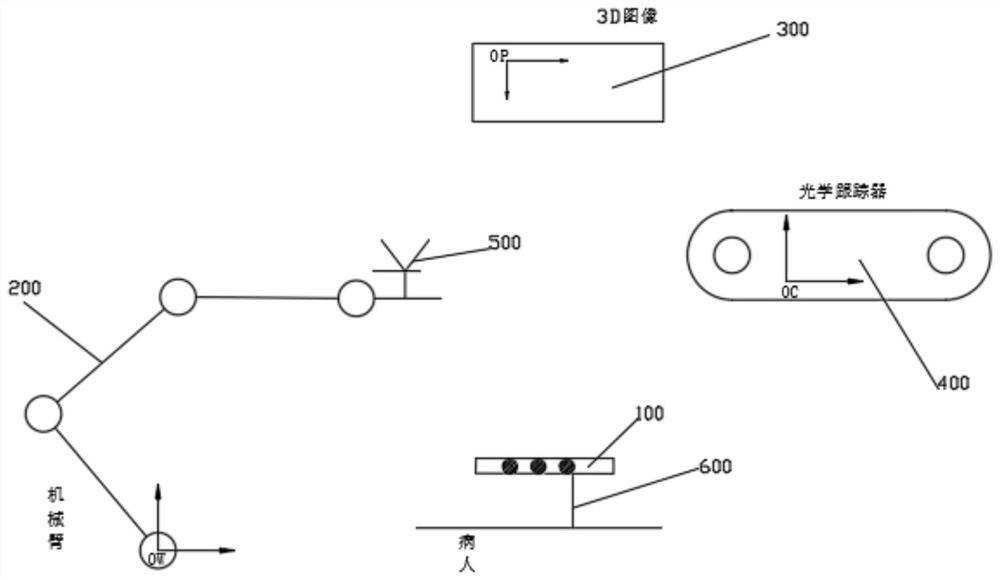
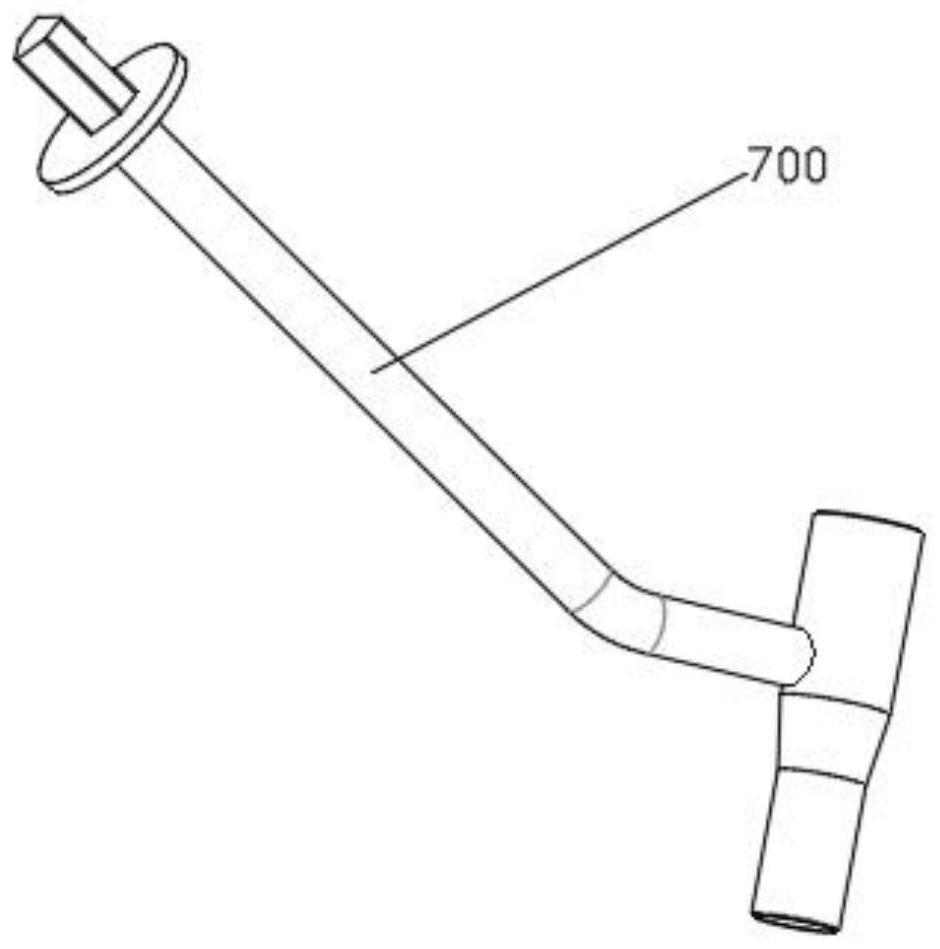
[0037] Such as figure 2 As shown, based on the above-mentioned three-dimensional image-specific positioning scale 1001, the present invention also proposes a surgical navigation system, which includes a three-dimensional image-specific positioning scale 100, a surgical robot 200, a host computer (not shown), a Optical tracker 400 , a robot tracker 500 , a fixed image-specific marker Kirschner wire 600 , a three-dimensional imaging device 300 and a guide 700 . Wherein, the surgical robot 200 is a mechanical arm with at least three translation degrees of freedom and three rotation degrees of freedom. The host computer is connected with the surgical robot 200 and the optical tracker 400 for controlling the movement of the surgical robot 200 and reading the coordinates of the marked points identified by the optical tracker 400 . Robotic tracker 500 is a tool that can be read by optical tracker 400 at the end of surgical robot 200 .
[0038] The optical tracker 400 can identify ...
Embodiment 3
[0042] The positioning method of this embodiment includes the following steps: 1) fixing the 3D image-specific positioning scale on the surface of the surgical site of the patient through Kirschner wires, using a 3D imaging device to scan the 3D image-specific positioning scale and the patient’s surgical site together, and the 3D The imaging device obtains the image of the marked points on the 3D image positioning scale and the patient image, and transmits it to the host computer; at the same time, the optical tracker acquires the coordinates of the 3D image positioning scale and transmits it to the host computer; The marked points in the image are compared with the preset geometric features of the marked points to realize the corresponding identification between the marked points in the three-dimensional image positioning scale and the marking points in the image; Calculate the coordinate transformation relationship between the patient image and the optical tracker according t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More