

Mobile robot trajectory tracking control method based on strategy iteration
A mobile robot and trajectory tracking technology, applied in the field of reinforcement learning, can solve problems such as adverse reactions and system modeling difficulties, and achieve good trajectory tracking and realize the effect of trajectory tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Embodiments of the present invention are described and stated in detail below in conjunction with the accompanying drawings, but are not limited to the above methods. Within the scope of the knowledge of those skilled in the art, as long as the concept of the present invention is based, various changes and improvements can be made.
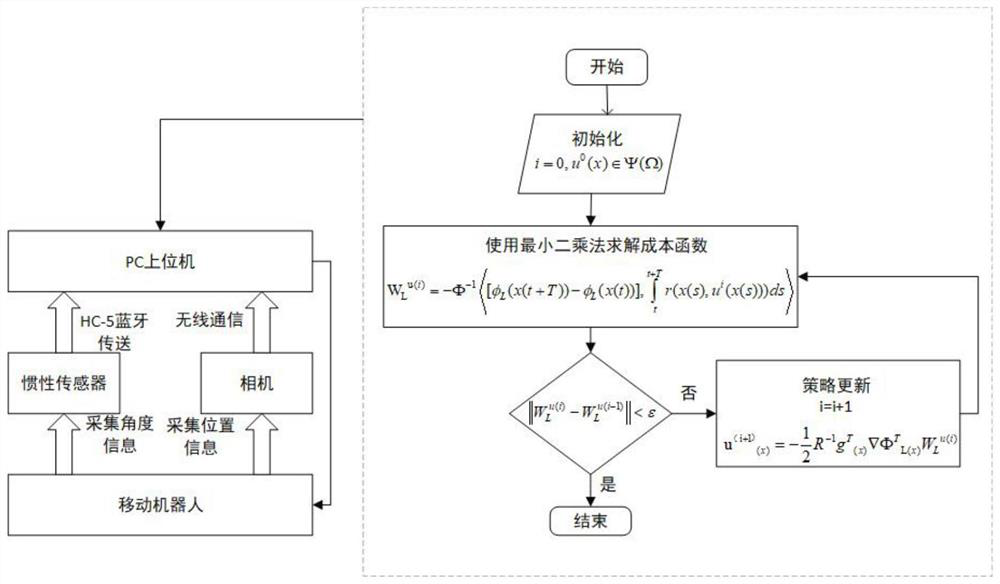
[0043] refer to Figure 1 ~ Figure 4 , a trajectory tracking control method for mobile robots based on policy iteration. Different from value-based methods, policy-based reinforcement learning methods directly try to optimize the policy function to achieve tracking. For known mobile robot systems, two neural networks are built first. They are actor neural network and critic neural network respectively. The actor neural network is used to evaluate and improve the system control strategy, and the critic neural network is mainly used to calculate the value function under the current control strategy, and use this value function to evaluate th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More