Robot path planning method and planning system
A path planning and robot technology, applied in the field of robot navigation, to achieve the effect of saving resources and improving sample efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0098] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
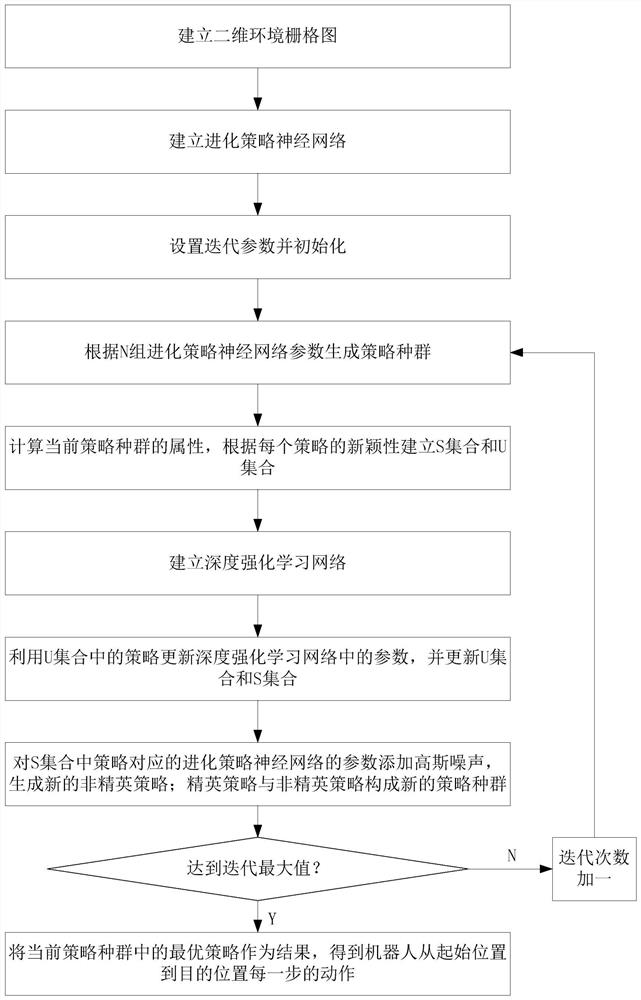
[0099] The invention discloses a robot path planning method, such as figure 1 shown, including:
[0100] S1. Rasterize the two-dimensional scene of the robot's activities into a two-dimensional environment grid map, and the attribute of each grid is an obstacle or a road; obtain the starting position coordinates s of the robot in the two-dimensional environment grid map 0 and the target position coordinates s d ;
[0101] S2. Construct an evolutionary strategy neural network, such as figure 2 As shown, the evolution strategy neural network includes an input layer 21, a hidden layer 22, a Relu activation unit 23, an output layer 24, and a Sigmoid activation unit 25 connected in sequence; the input layer has 2 neurons; the hidden layer includes 2 cascaded sub-layers, Relu activation unit is arranged in the middle of the two hidden sub-layers...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More