

Leg active adjusting method for stable transition of quadruped robot in variable stiffness terrain
A technology of quadruped robot and adjustment method, which is applied in the field of quadruped robot motion research, can solve the problem of low cost, and achieve the effect of self-adaptation, reduction of overall redundancy, and good control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The following will clearly and completely describe the technical solutions in the embodiments of the present invention in combination with the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
[0048] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other.
[0049] The present invention will be further described below in conjunction with specific examples, but not as a limitation of the present invention.
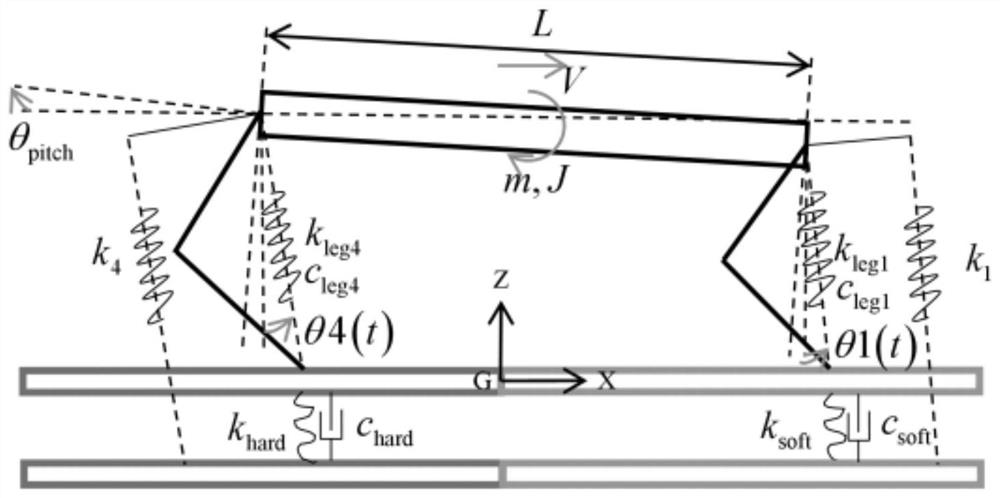
[0050] The transition situation of quadruped robot under variable stiffness ground is analyzed. When the quadruped robot lands on the ground, since the footh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More