Walking control method and device of biped robot and biped robot
A biped robot and walking control technology, applied in the field of biped robot walking control, biped robot and computer readable storage medium, can solve the problem of robot walking instability, and achieve the desired torque control amount accurate and walking stability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
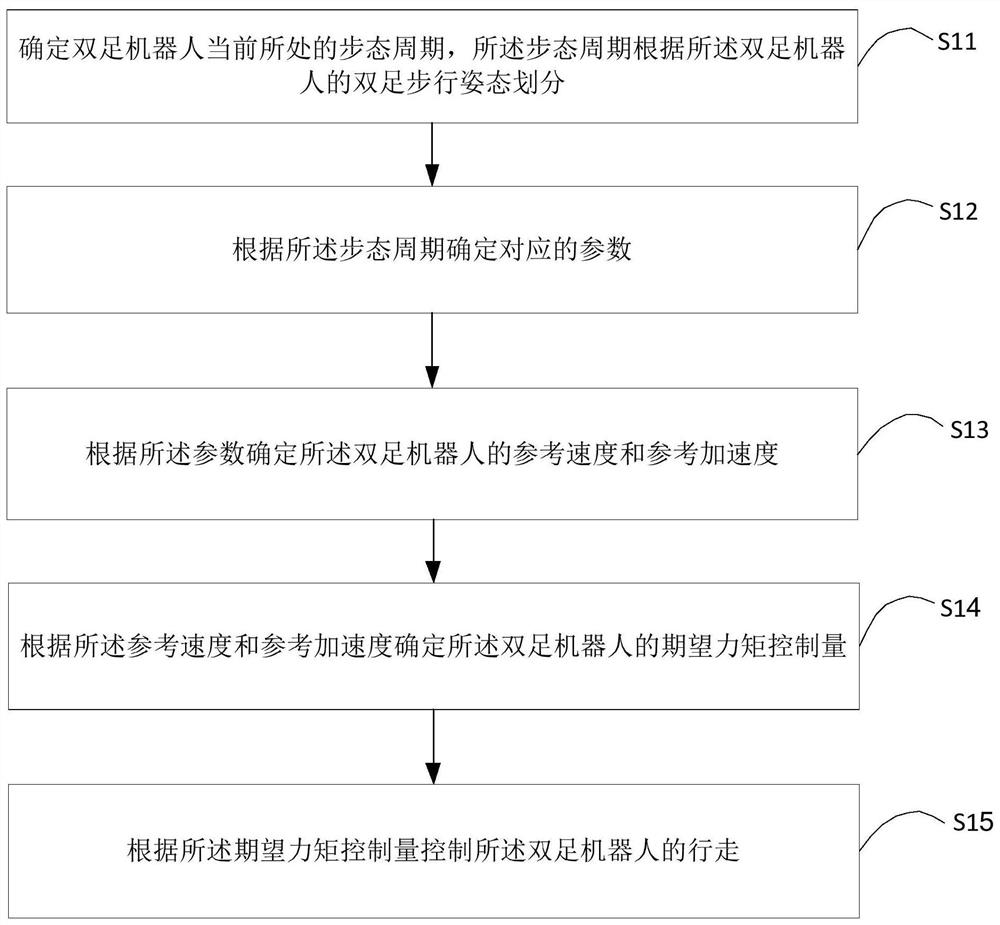
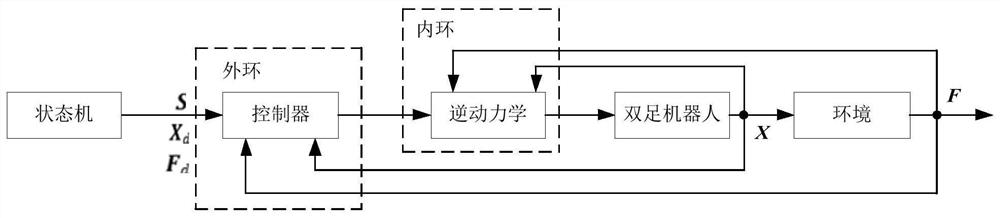
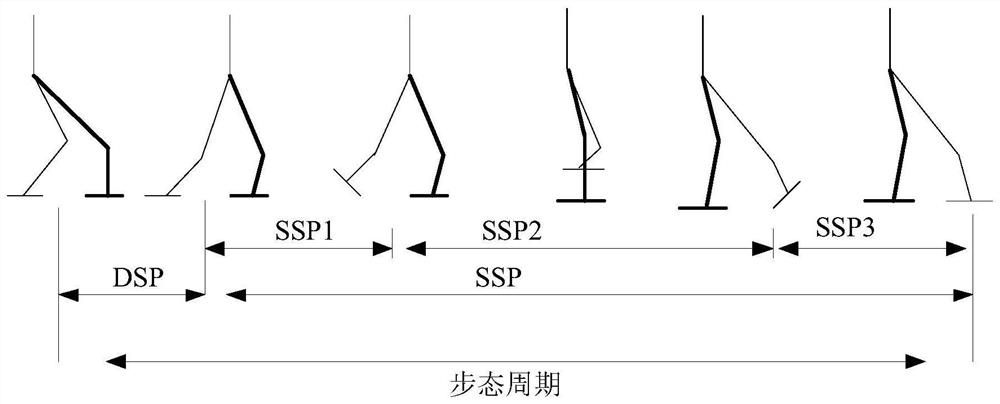
[0035] When users use a biped humanoid robot (referred to as a biped robot), they all hope that the biped robot can walk stably, but in the process of walking, the existing biped robot is likely to be unstable. . This is because when the swing leg of the biped robot touches the ground, it will be subjected to a sharply increased ground support reaction force, which will cause the biped robot to become unstable. join Picture 1-1 , in order to solve this technical problem, the embodiment of the present application proposes to select corresponding parameters according to the current gait cycle of the biped robot, and determine the reference velocity and reference acceleration of the biped robot according to the selected parameters, and then determine the torque control amount, and finally control the walking of the biped robot according to the desired torque control amount. That is, the gait cycle is determined by the state machine, and then the determined parameters (such as ...
Embodiment 2
[0128] Corresponding to the walking control method of the biped robot described in the above embodiments, Figure 5 A structural block diagram of the walking control device of the biped robot provided by the embodiment of the present application is shown, and for the convenience of description, only the parts related to the embodiment of the present application are shown.
[0129] refer to Figure 5, the walking control device 5 of the biped robot includes: a gait cycle determination unit 51, a parameter determination unit 52, a reference quantity determination unit 53, a torque control quantity determination unit 54, and a robot walking control unit 55, wherein:
[0130] A gait cycle determining unit 51, configured to determine the gait cycle of the biped robot currently in which the gait cycle is divided according to the biped walking posture of the biped robot;
[0131] A parameter determining unit 52, configured to determine corresponding parameters according to the gait ...
Embodiment 3
[0160] Image 6 A schematic structural diagram of a biped robot provided in Embodiment 3 of the present application. like Image 6 As shown, the biped robot 6 of this embodiment includes: at least one processor 60 ( Image 6 Only one processor is shown in ), a memory 61 and a computer program 62 stored in the memory 61 and operable on the at least one processor 60, when the processor 60 executes the computer program 62, the above-mentioned Steps in any of the various method embodiments:
[0161] Determine the current gait cycle of the biped robot, where the gait cycle is divided according to the biped walking posture of the biped robot;
[0162] determining corresponding parameters according to the gait cycle;
[0163] determining a reference velocity and a reference acceleration of the biped robot according to the parameters;
[0164] determining an expected torque control amount of the biped robot according to the reference speed and the reference acceleration;
[0165...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com