

Collision avoidance auxiliary decision-making method based on ship driver preference
An auxiliary decision-making and driver technology, applied in ship traffic control, traffic control systems, resources, etc., can solve problems such as insufficient to deal with complex and changeable maritime traffic environments, single decision-making scheme for collision avoidance, inability to respond accurately, etc., to achieve The effect of avoiding water traffic accidents, improving efficiency, and reducing misjudgments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0112] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
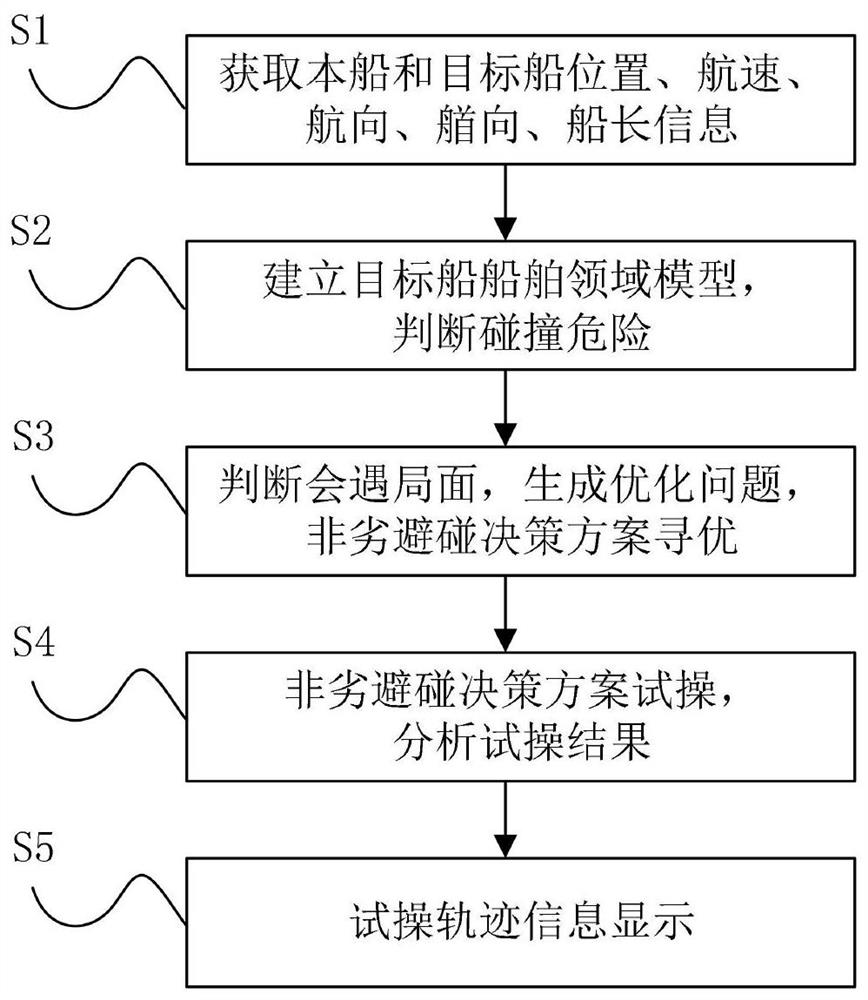
[0113] Such as figure 1 As shown, the present embodiment provides a collision avoidance assistant decision-making method based on the ship driver's preference, including the following steps:
[0114] S1, obtain the ship information of own ship o and target ship i, the ship information includes: target ship heading H i , the target ship heading C i , target ship speed v i , target ship bearing B i , the target ship distance d i , target ship captain L i ;Own ship heading H o , ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More