Obstacle detection method, inspection robot vehicle-mounted obstacle avoidance system and method
An inspection robot and obstacle detection technology, applied in motor vehicles, control/regulation systems, instruments, etc., can solve the problems of low recognition rate, high false alarm rate, and large size of the visual recognition system, so as to solve the problem of straight road false alarms. High rate, solve the error of judgment, improve the effect of detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
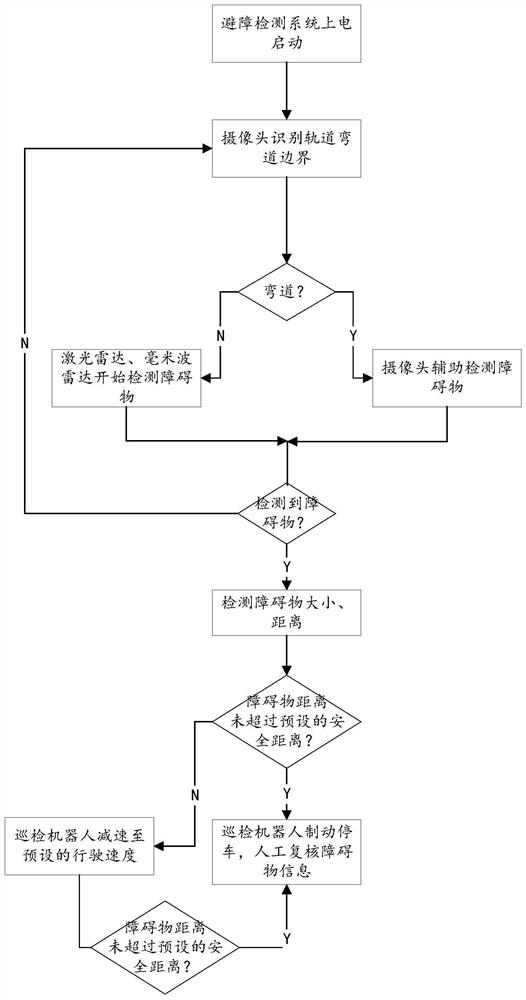
[0032] The invention provides an obstacle detection method, which can be used for obstacle detection by a track inspection robot, and the inspection robot is equipped with a detection radar system and an image acquisition system;
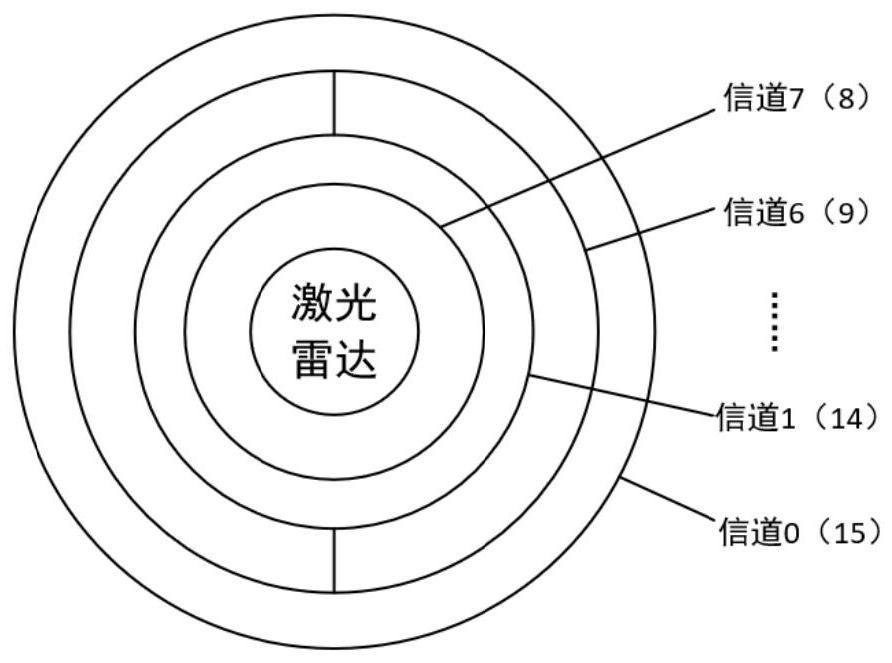
[0033] The detection radar system includes multiple detection radars that detect obstacle information synchronously, and each detection radar starts to detect obstacle information synchronously;
[0034] When any detection radar detects obstacle information or when the inspection robot travels to a curved road section, the image acquisition system starts synchronously to collect obstacle pictures according to the obstacle information detected by the detection radar system, and approves the identification of effective target obstacles information.
[0035] The obstacle detection method provided by the present inventio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com