

Positioning and mapping method and system based on fusion of laser radar and inertial measurement unit
An inertial measurement unit and lidar technology, which is used in radio wave measurement systems, measurement devices, surveying and navigation, etc., can solve problems such as the accumulation of altitude errors, suppress the accumulation of attitude angle errors, solve the problem of attitude angle estimation deviation, and solve Effects of Height Error Accumulation Problem
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be described in detail below with reference to the accompanying drawings and examples.
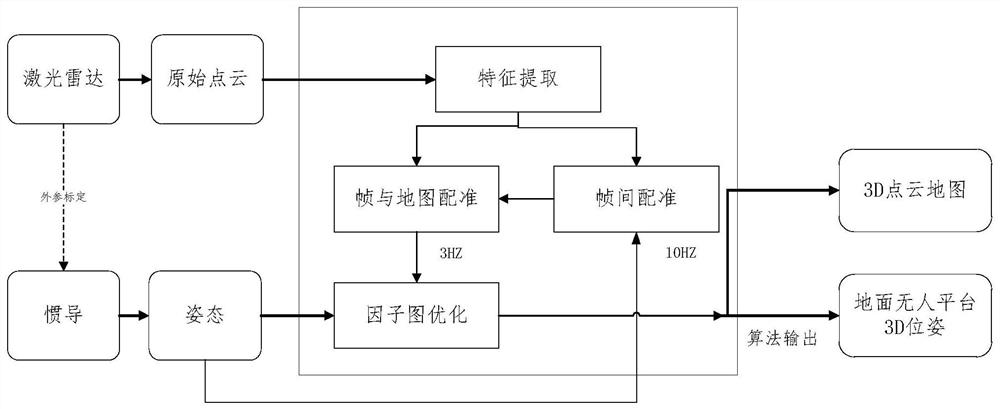
[0049] The present invention provides a real-time positioning and mapping framework based on the fusion of 3D laser radar and inertial measurement unit based on factor graph optimization. The overall framework of the system is as follows: figure 1 shown.
[0050] The real-time positioning and mapping method of laser radar and inertial measurement unit fusion provided by the embodiment of the present invention includes the following steps:
[0051] Step 1: Carry out joint calibration on the lidar and the inertial measurement unit IMU.
[0052] In order to determine the relative rotation matrix of the lidar and IMU The lidar and IMU are jointly calibrated using the hand-eye calibration equation, and this step is carried out in an offline environment with rich indoor feature points.
[0053] (1) Hand-eye calibration equation
[0054] Hand-eye calibration...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More