

Minimally invasive surgical instrument based on flexible cable traction series elastic driving and use method thereof
A series elastic, minimally invasive surgery technology, applied in surgery, surgical forceps, medical science, etc., can solve problems such as poor hand-eye coordination, poor flexibility of surgical instruments, and limit the development of minimally invasive surgery technology, and achieve a simple structure and easy control Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The specific implementation manners of the present invention are given below and described in conjunction with the accompanying drawings.
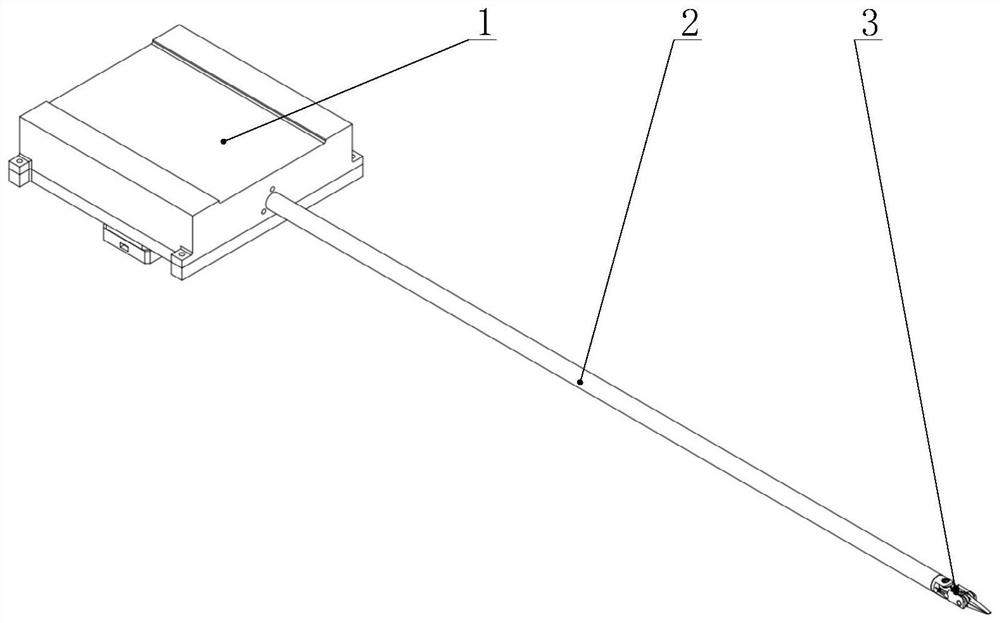
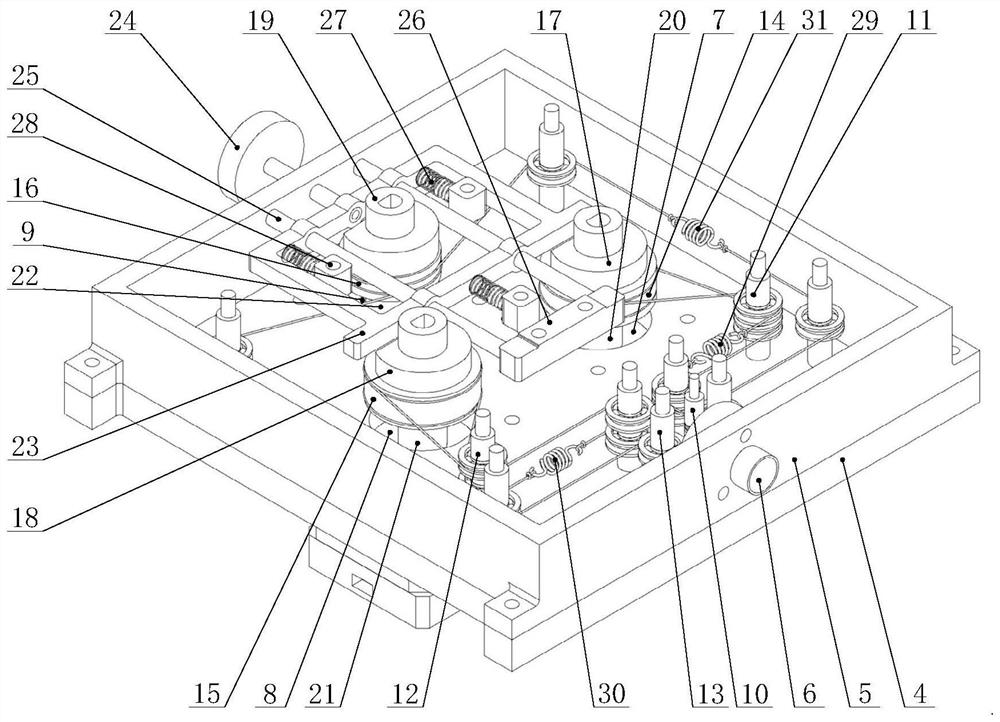
[0026] Such as figure 1 As shown, the minimally invasive surgical instrument based on cable traction series elastic drive is composed of a micro-instrument base 1 , a slender connecting tube 2 and an end effector 3 . Such as figure 2 As shown, the micro-device base 1 includes a base box body 4, a motor mounting base 5, a base connector 6, a stepping motor 1 7, a stepping motor 2 8, a stepping motor 3 9, a wire rope transmission assembly, a wire wheel 14, Wire wheel two 15, wire wheel three 16, special-shaped wire wheel positioning sleeve one 17, special-shaped wire wheel positioning sleeve two 18, special-shaped wire wheel positioning sleeve three 19, reset push rod 23, reset push rod button 24, reset guide rod 25, Reset guide rod fixed block 26, back-moving spring 27 and back-moving spring fixed block 28; Motor mount 5 is fixed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More