

Lane line extraction method based on dynamic ROI and improved firefly algorithm
A technology of firefly algorithm and extraction method, which is applied in the field of lane line extraction based on dynamic ROI and improved firefly algorithm, can solve the problems of low accuracy rate of lane lines, poor robustness, false detection of noise as edges, etc., to improve accuracy and The effect of robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further explained below in conjunction with the accompanying drawings.
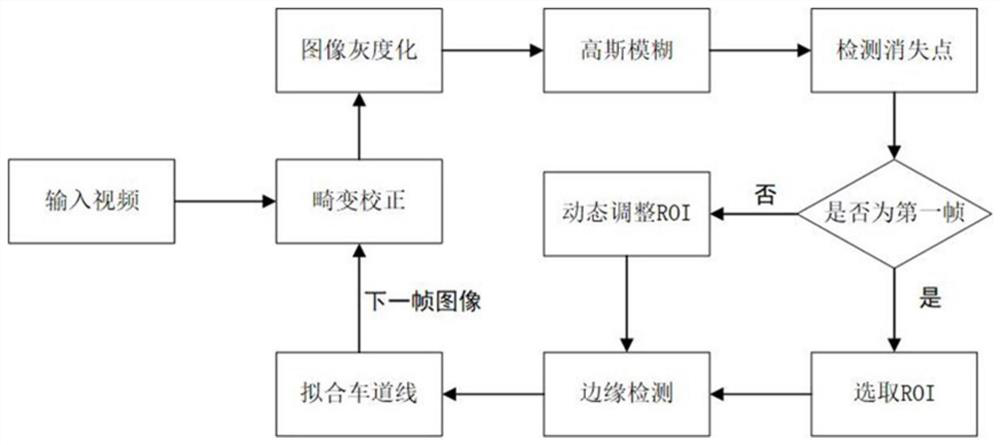
[0030] Such as figure 1 It is a flow chart of the lane line extraction method based on dynamic ROI and improved firefly algorithm of the present invention, the lane line extraction method specifically includes the following steps:
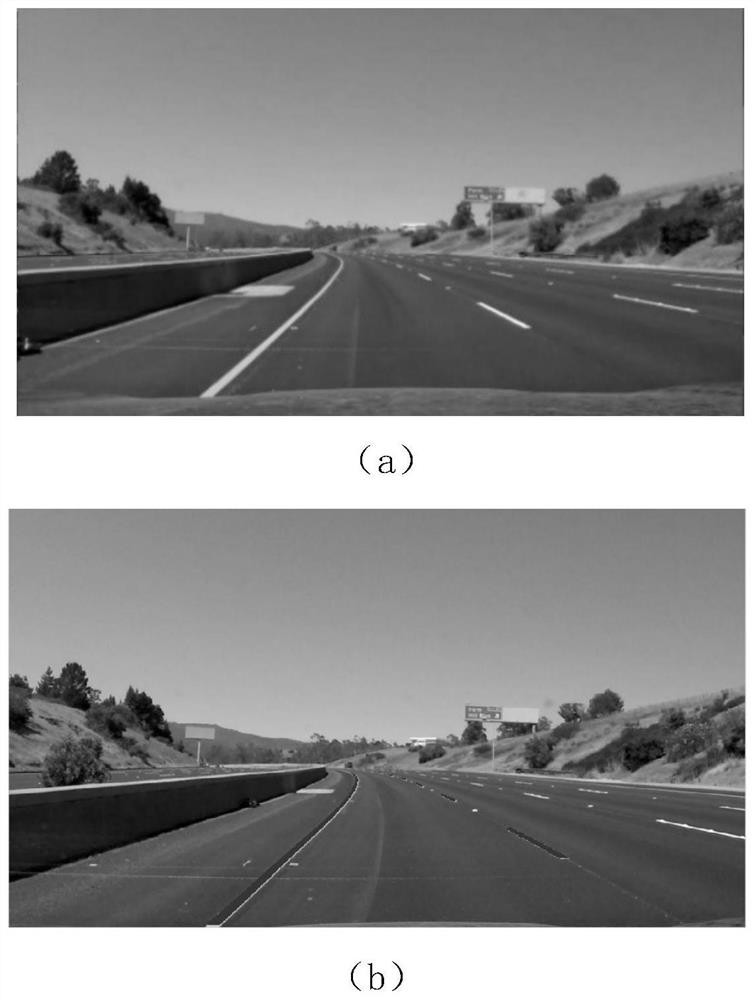
[0031] (1) Obtain the lane line video during the driving process of the vehicle in real time, and perform distortion correction, grayscale processing and Gaussian blur processing on the video frame to obtain the preprocessed video frame.
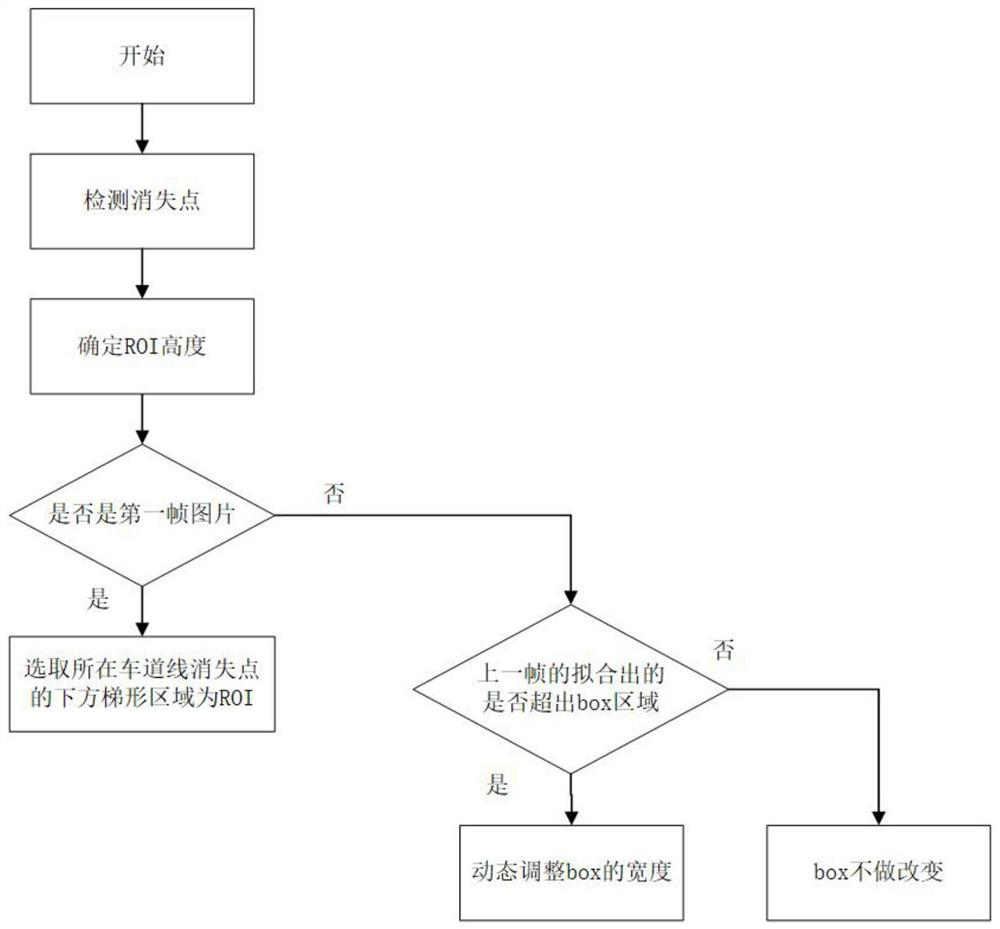
[0032] (2) For the first pre-processed video frame, select the lower 1 / 2 image of the pre-processed video frame as the ROI area.
[0033] (3) carry out edge detection to ROI region by improved firefly algorithm, obtain the edge coordinates of lane line; Step (3) comprises following sub-steps:
[0034] (3.1) Randomly select pixels in the ROI area as the distribution points of fireflies, and divide the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More