Rigid-flexible coupling dexterous prosthetic hand
A technology of rigid-flexible coupling and prosthetic hand, which is applied in the field of medical devices, can solve the problems that fingers cannot adapt to the shape of objects, cannot realize four-finger opening and closing, and easy to loosen the grip, etc., to achieve long-term wearing, good adaptability, and expansion The effect of range of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
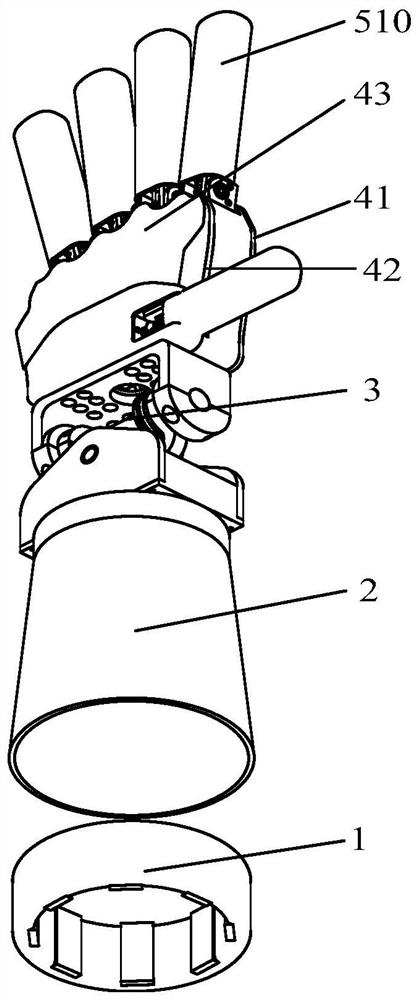
[0037] In the description of the embodiment of the present invention, it should be stated that the direction where the finger points is forward, the direction where the palm is located is the back, the back side of the palm is upper, and the palm side is lower.
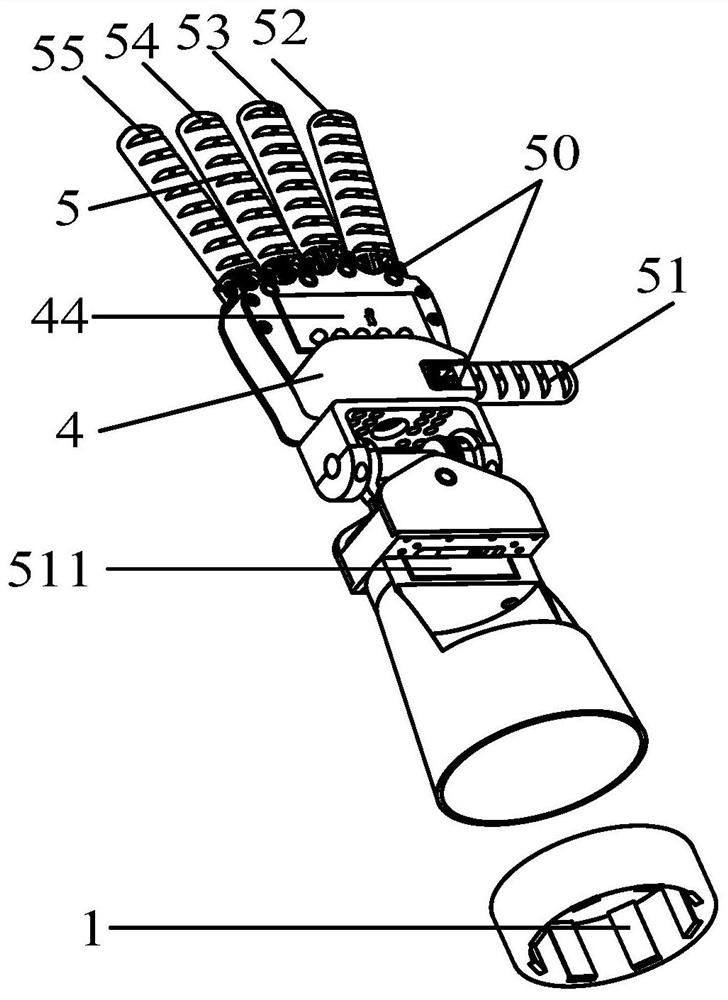
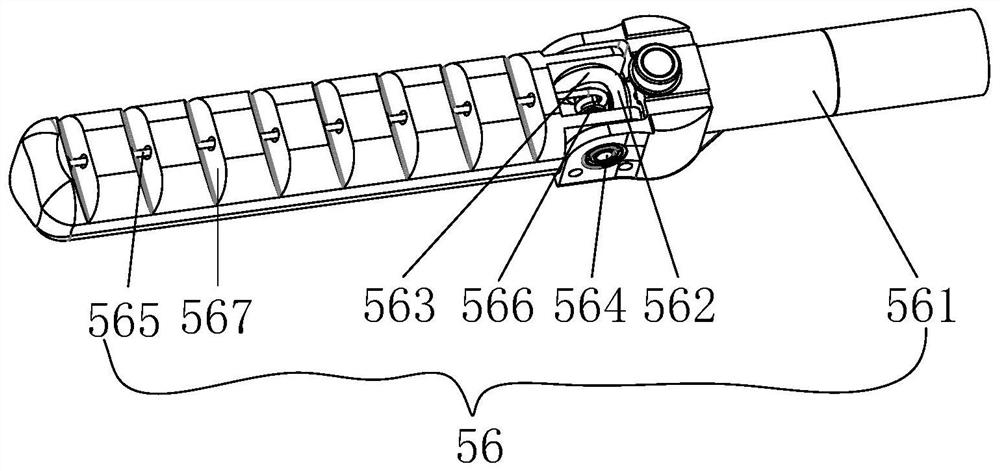
[0038] Such as Figure 1-Figure 9 As shown, the present invention provides a rigid-flexible coupled dexterous prosthetic hand, including a myoelectric armband 1 and a prosthesis cover 2 set on the patient's arm, a wrist mechanism 3 fixed on the prosthesis cover 2 through a wrist support frame 310, The palm mechanism 4 fixedly connected to the wrist mechanism 3 through the wrist flexion and extension joint connector 315 and the finger mechanism 5 arranged at the front end of the palm mechanism 4; , middle finger 53, ring finger 54 and little finger 55, five finger flexion and extension power assemblies 56 for driving five fingers respectively, thumb rotation assembly 57 for driving thumb 51 rotation and index finger 52...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap