Virtual-real combination and man-machine interaction underwater remote control robot manipulator operation system and method
A technology of human-computer interaction and underwater remote control, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., which can solve the problems of reduced operating efficiency and accuracy, and operator fatigue and tension, so as to ensure operating accuracy and reduce the difficulty of operation control , the effect of convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
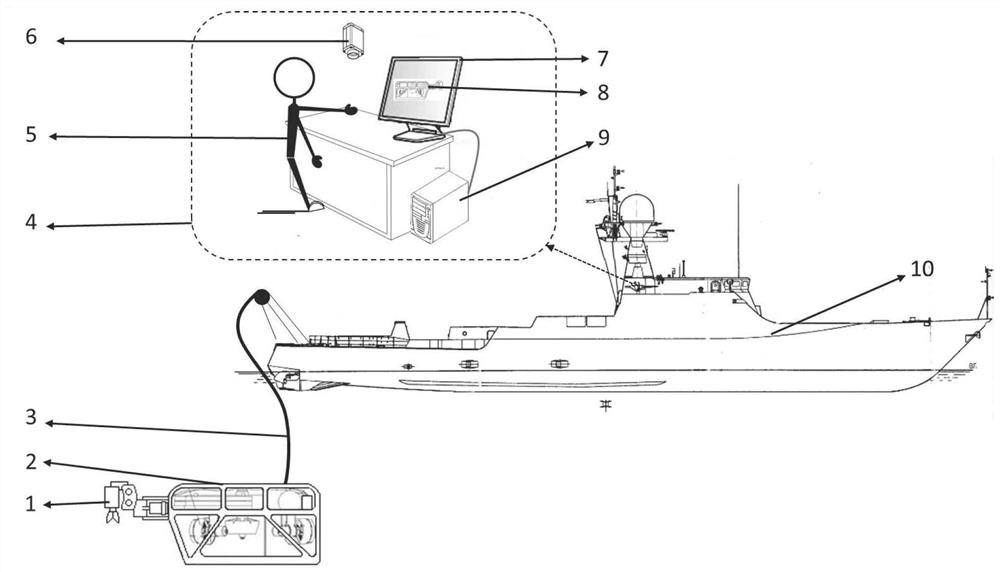
[0028] see figure 1 with figure 2 , the underwater remote control robot manipulator operation system combining virtual reality and human-computer interaction, including mother ship, computer, display, three-dimensional somatosensory camera, underwater robot, manipulator and umbilical cable. It is characterized in that: the computer, display and three-dimensional somatosensory camera are placed in the operating cabin of the mother ship, and the underwater robot and manipulator are placed in the underwater operating environment through the umbilical cable. The three-dimensional somatosensory camera is placed above the operator's head to capture the body movements of the operator's arms and hands; the monitor is used to display the virtual manipulator generated by the computer; the computer captures the operator's body movements to obtain the operator's operation intention, and The virtual manipulator is displayed on the screen for the operator to watch while watching the opera...
Embodiment 2
[0031] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
[0032] In this embodiment, an underwater remote control robot manipulator operation system that combines virtual reality and human-computer interaction is specifically as follows:
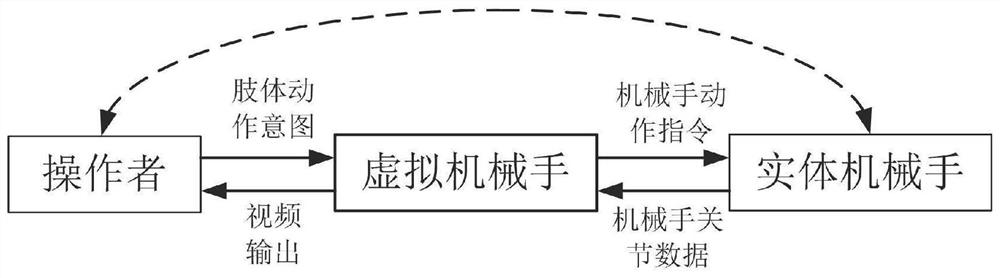
[0033](1) Construct a virtual manipulator exactly the same as the underwater entity manipulator in the computer, and display on the screen, for the operator to watch when working; the underwater entity manipulator sends the actual angle data of its joints to the computer through the umbilical cable, After the computer receives the joint angle data of the physical manipulator, it changes the joint angle of the virtual manipulator displayed on the screen to be completely consistent with the joint angle of the physical manipulator.
[0034] (2) The operator looks at the virtual manipulator on the screen, uses his arm and hand to grasp, and sends the virtual manipulator an action command of stretchi...
Embodiment 3
[0038] This embodiment is basically the same as the above-mentioned embodiment, and the special features are as follows:
[0039] In this embodiment, an underwater remote control robot manipulator operation method combining virtual reality and human-computer interaction adopts the above-mentioned system for operation, and is characterized in that the operation steps include:
[0040] The first step is to turn on the equipment, including the computer, display screen, 3D somatosensory camera, and underwater physical manipulator, to ensure that the equipment is normal, and the 3D graphics that are exactly the same as the underwater physical manipulator are displayed on the screen as a virtual manipulator;
[0041] In the second step, the operator is located in the operation cabin of the mother ship, looks at the virtual manipulator on the screen, and makes operation intentions such as arm stretching, moving left and right, and grasping the hand according to the operation task. The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



