

Pan-tilt attitude estimation method based on extended Kalman filtering
An extended Kalman and attitude estimation technology, applied in the field of Kalman filtering, can solve problems such as lack of accuracy and unsatisfactory results, and achieve the effects of improving accuracy, avoiding mutual interference, and reducing influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0087] The present invention will be described in detail below with reference to the accompanying drawings and examples.
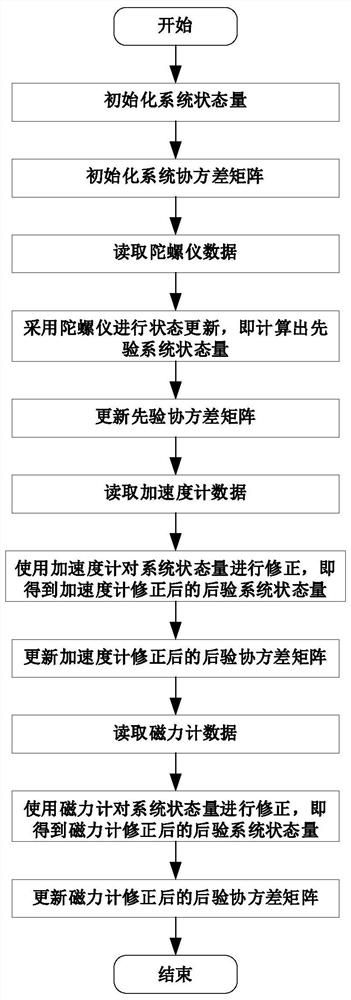
[0088] Such as figure 1 Shown, the present invention is based on the PTZ attitude estimation method of extended Kalman filter, comprises:
[0089] 1. The heading and attitude reference system (AHRS) is used to provide more accurate attitude information to the gimbal controller. The attitude information is represented by Euler angles, which include pitch angle, roll angle and yaw angle. The pitch angle is the rotation angle Φ of the gimbal around the Y axis; the roll angle is the rotation angle θ of the gimbal around the X axis; the yaw angle is the rotation angle ψ of the gimbal around the Z axis. AHRS provides the navigation coordinate system and the body coordinate system. The direction cosine matrix (DCM) expresses the relationship between the two coordinate systems, and contains the relevant attitude information of the gimbal. Due to the defect of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More