

Autonomous release and recovery system of patrol unmanned aerial vehicle, control method and method
A recovery system and control method technology, applied in the direction of non-electric variable control, height or depth control, control/regulation system, etc., can solve the problem of not being able to take advantage of the advantages of UAVs in patrolling highways, UAVs with limited battery life, and taking up labor. Resources and other issues, to achieve the effect of strong highway patrol unmanned cruise capability, saving labor and resources, and increasing the density
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
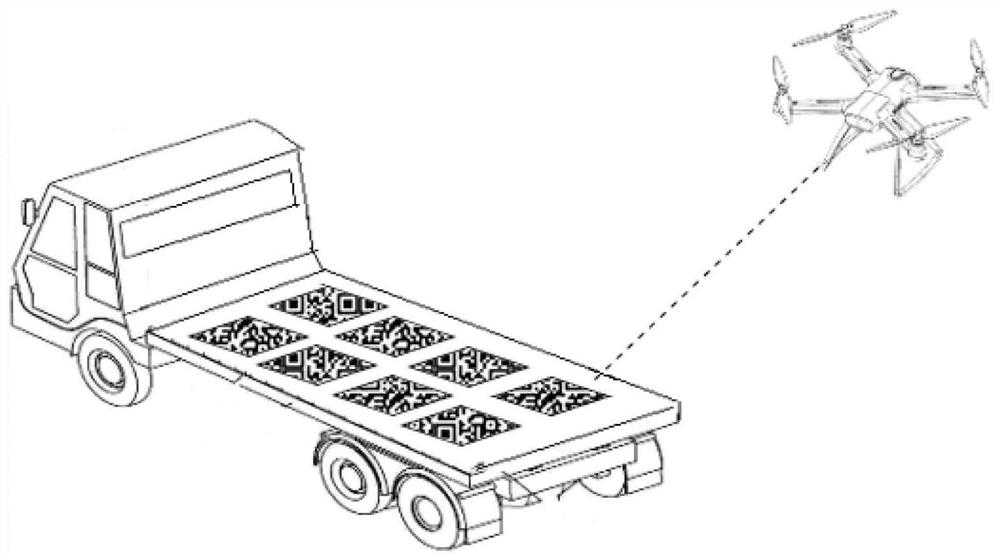
[0048] This embodiment provides a self-reliant release and recycling system of a highway inspection drone, such as Figure 2-3 As shown, including the control system and all patrol cars and drones connected to the control system. This system will release drones through patrol cars, and will also recover drones through patrol cars. In this way, it reduces the payment of manual resources. It will also greatly reduce labor costs and save resources.
[0049] On the patrol car, there is a platform with a drone charging device and a platform for drone parking takeoff. The drone charging device is a wireless charging device. When the drone landed in the corresponding position, the control system controls the drone charging device for the drone charging when the drone's power information is lower than the preset value.
[0050]The drone is at least one, which sets an electric quantity detection module and a violation monitoring module for obtaining the inspection section information; the d...
Embodiment 2
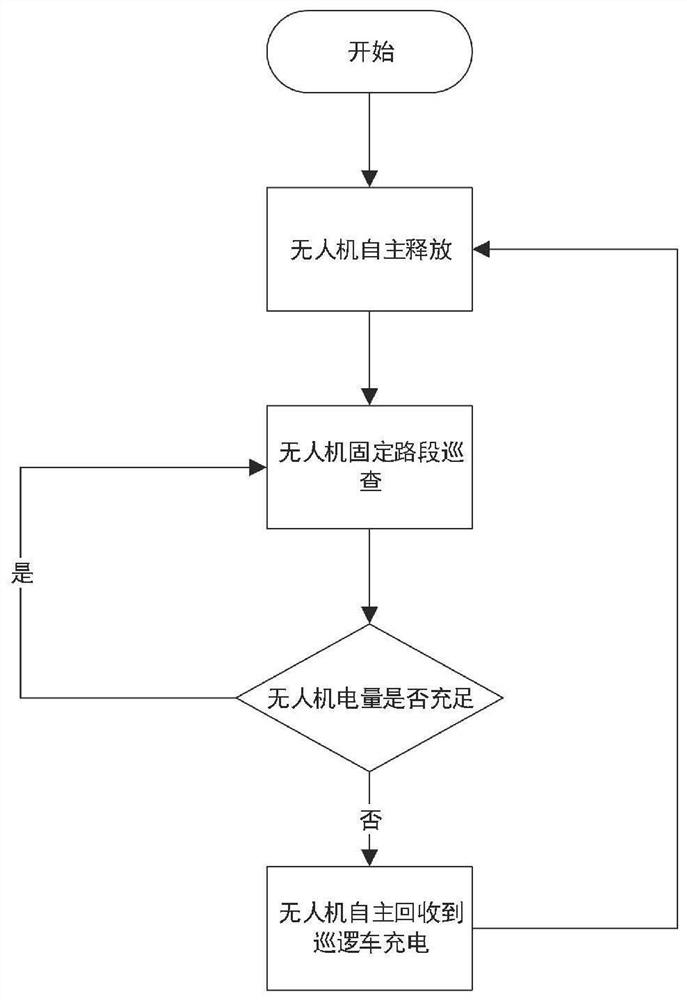
[0058] This embodiment provides an autonomous release and recovery control method of inspecting drones, including the following steps:
[0059] Generate a preset vehicle travel path and deliver to the inspection vehicle; through the precision position of the inspected section, thereby generating the preset vehicle travel path and the preset drone inspection path;
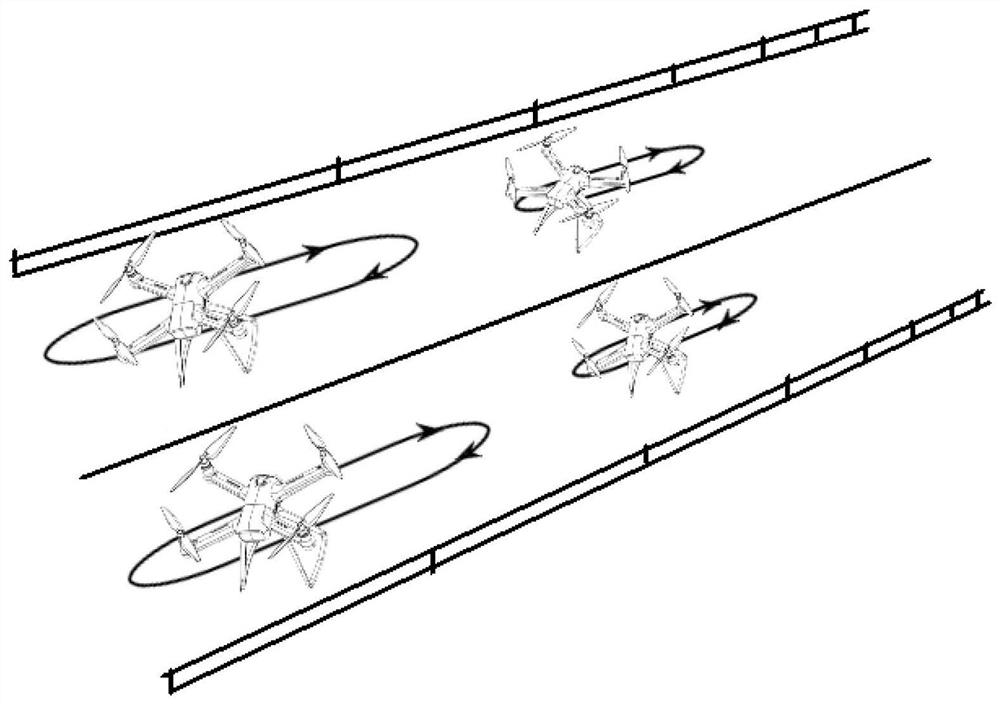
[0060] When the drone is patrolled, the inspection section information is obtained through the illegal monitoring module;
[0061] Real-time electricity information is obtained in real time through the powerless power detection module of the drone;
[0062] Generate a preset drone inspection path and generate drone control information according to the preset drone inspection path and the unmanned power information and transmit it to the drone, and control the drone according to the preset drone inspection. The path takes off or landed on the platform of the patrol car;
[0063] When the power information of the acquired...
Embodiment 3
[0072] The embodiment of the present invention also provides a self-reliant release and recovery method of a highway inspector drone, including the following steps:
[0073] Installing a platform for drone take-off off on the patrol car and a drone charging device;
[0074] The drive patrol car travels along the fixed time period along the preset vehicle;
[0075] When the drone is in the takeoff range of the drone inspection path, obtain the power information of the drone in real time. When the drone's power information is not lower than the preset value, the control drone starts to inspect; When the power information of the drone is lower than the preset value, the drone charging is charged by the drone charging device;
[0076] When the drone picks up the inspection, it takes a real-time electricity information; when the power information of the drone is lower than the preset value, the control drone landed to the inspection vehicle, through the drone charging device Drone char...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More