

Kinetic parameter identification method for SCARA
A technology of dynamic parameters and identification methods, applied in the field of dynamic parameter identification for SCARA manipulators, can solve the problems of large least squares data, inability to dynamically update, and high identification costs, achieving strong global convergence ability, easy implementation, The effect of high recognition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] It should be noted that the following examples are used to illustrate the present invention, and should not be considered as limiting the protection scope of the present invention. Below I will further describe the specific implementation of the present invention in detail in conjunction with the accompanying drawings.
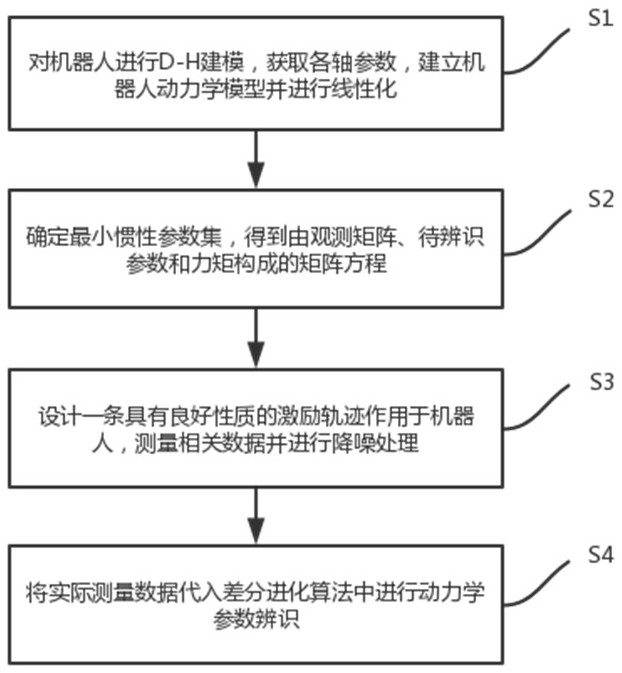
[0039] Such as figure 1 As shown, a dynamic parameter identification method for SCARA manipulator includes the following steps:
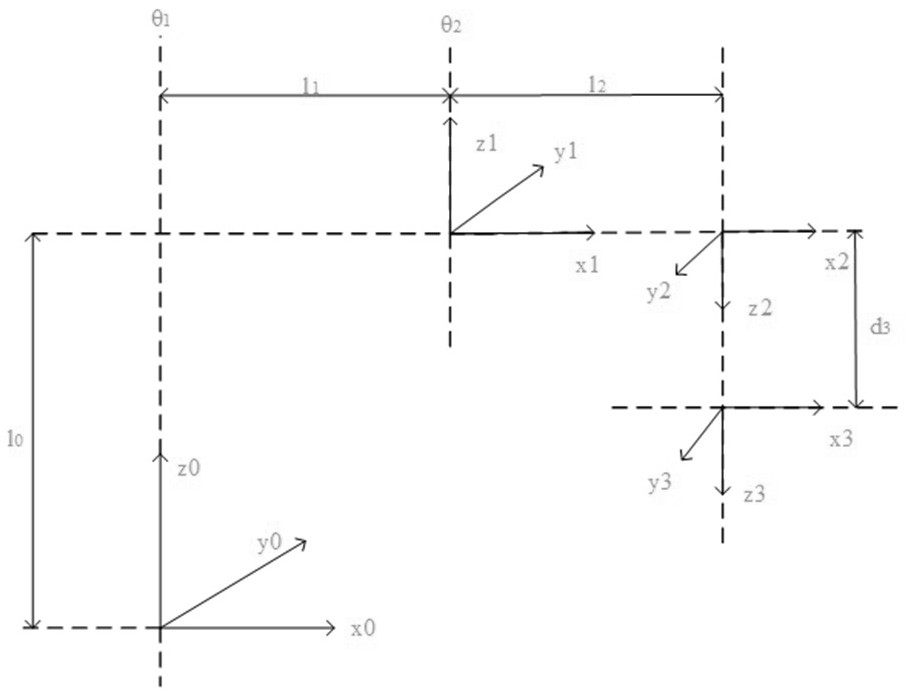
[0040] S1. Carry out D-H modeling for the robot, obtain the parameters of each axis, establish the dynamic model of the robot and perform linearization. Specifically, the coordinate system of the robot is established, the D-H parameters are obtained, and the dynamic model of the robot is established by using the Lagrangian method.
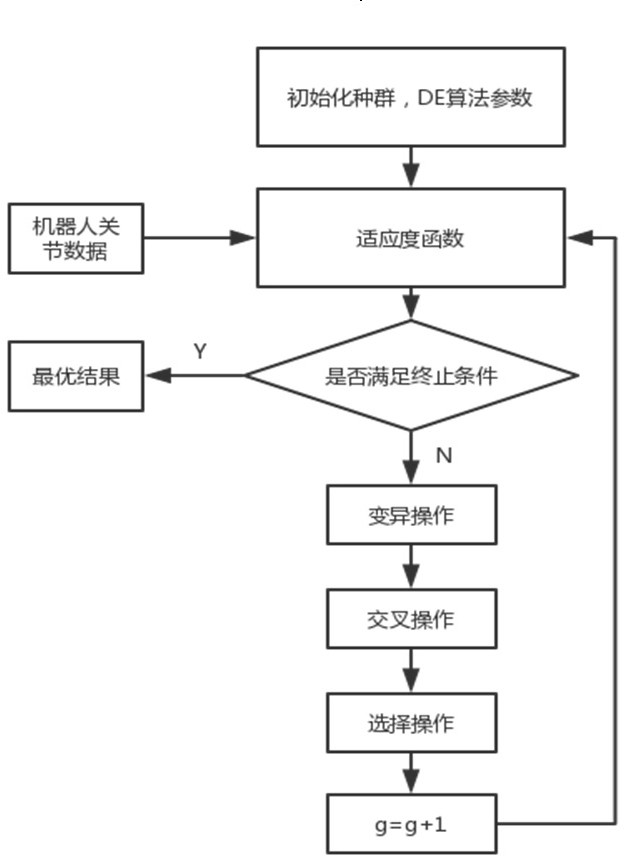
[0041] S2. Determine the minimum inertial parameter set, and obtain a matrix equation composed of an observation matrix, parameters to be identified and moment. The minimum inertia parameters a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More