Mechanical arm grabbing planning method and system combined with self-supervised learning
A technology of supervised learning and robotic arm, applied in 3D image processing, image analysis, processor architecture/configuration, etc., can solve problems such as low capture success rate, unreasonable capture strategy, and poor algorithm robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the objectives, technical solutions and advantages of the present invention, the present invention will be described in further detail below with reference to the accompanying drawings and examples. It should be understood that the specific embodiments described herein are merely intended to illustrate the invention and are not intended to limit the invention. Further, the technical features according to each of the various embodiments described below can be combined with each other as long as they do not constitute a collision between each other.
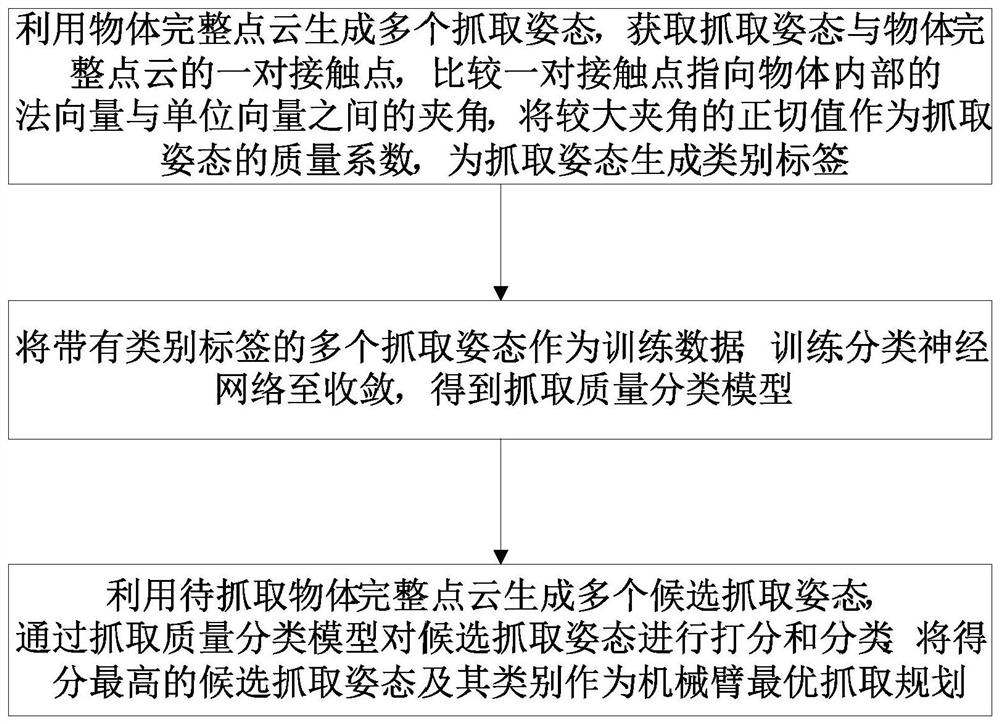
[0048] like figure 1 As shown, a mechanical arm gripping planning method combining self-supervised learning, including:
[0049] With the full point of the object to be grabbed, the cloud is generated, and the candidate grab posture is scored and classified by grabbing the quality classification model, and the candidate grab posture with the highest score and its category are optimal as a robot arm. planning;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



