

Intelligent agent path tracking control method
A control method and path tracking technology, applied in vehicle position/route/height control, comprehensive factory control, control/adjustment system, etc., can solve the problem of difficult balance between stability and path tracking accuracy, and intelligent body tracking stability and poor real-time performance, to achieve the effects of improving convergence speed and motion stability, good tracking stability and real-time performance, and good driving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
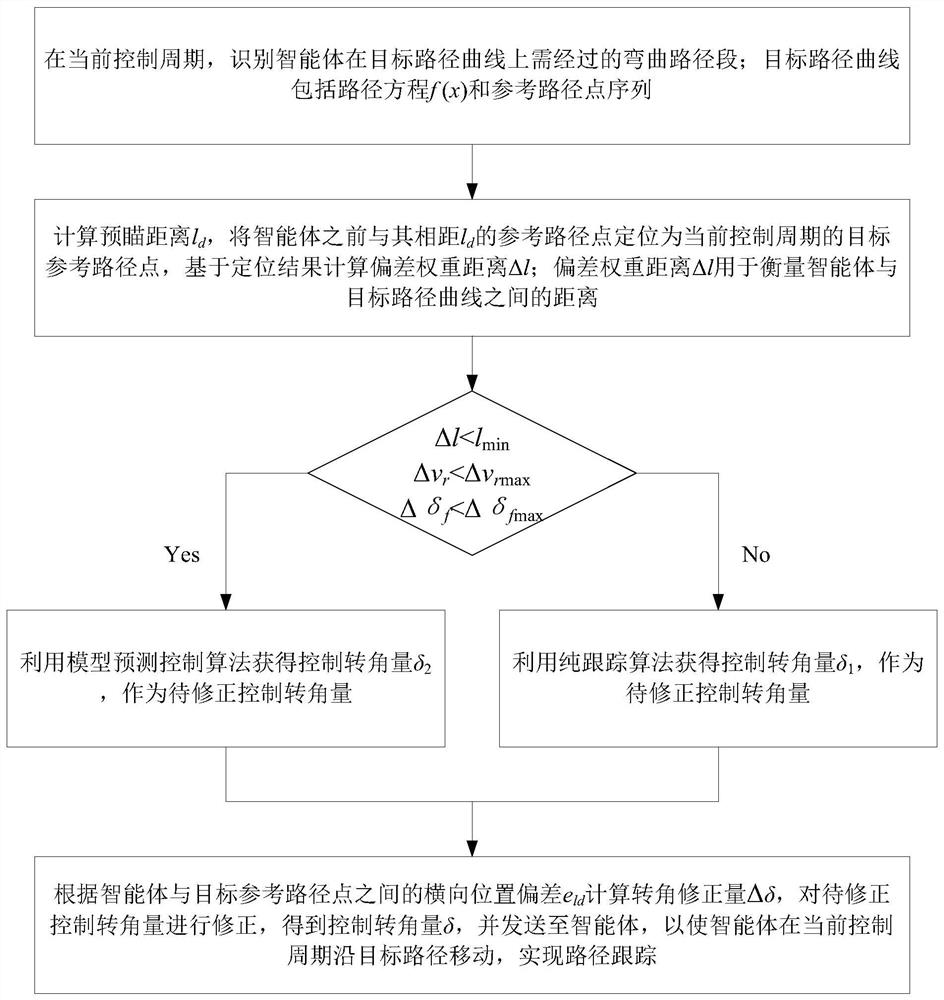
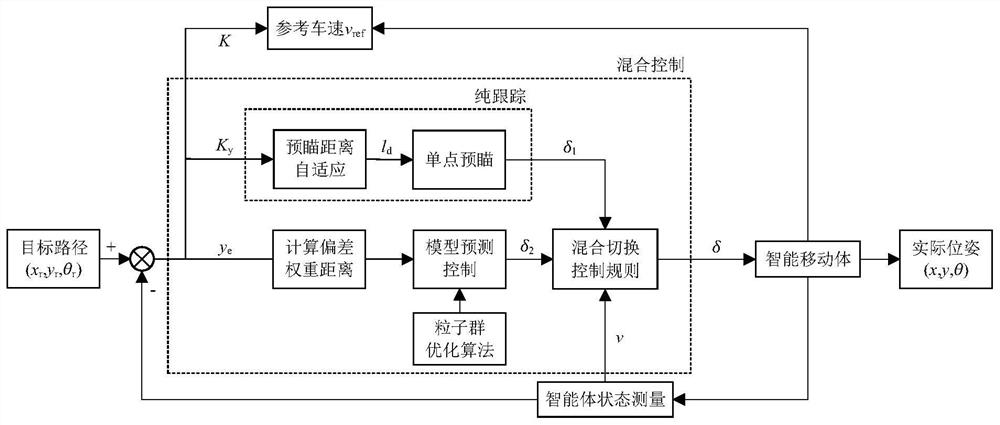
[0089] An agent path tracking control method, such as figure 1 and figure 2 shown, including:
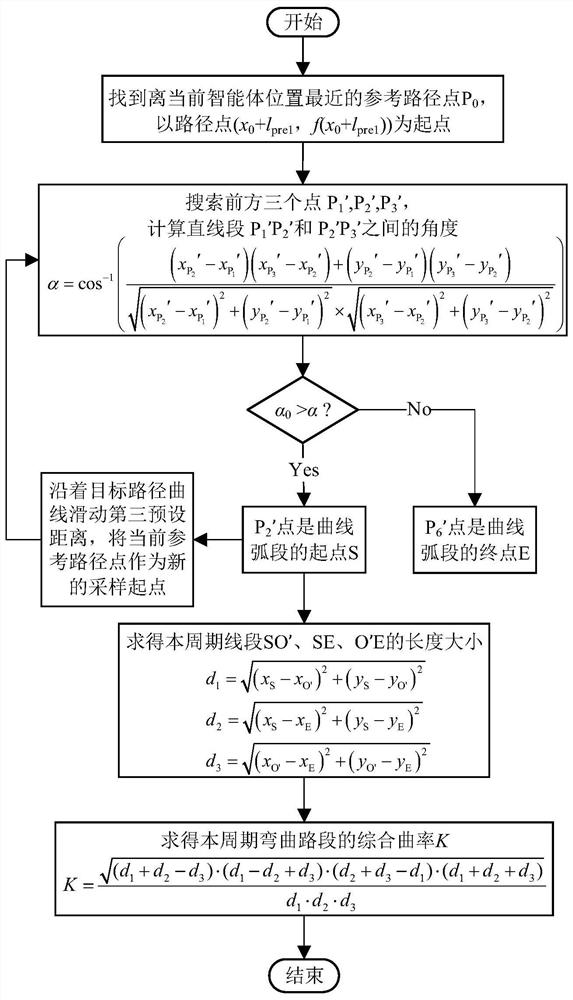
[0090] In the current control cycle, identify the curved path segment that the agent needs to pass through on the target path curve; the target path curve includes the path equation f(x) and the reference path point sequence;
[0091] Calculate the preview distance l d , the distance between the agent and its previous l d The reference path point of is positioned as the target reference path point of the current control cycle, and the deviation weight distance Δl is calculated based on the positioning result;
[0092] If Δlmin , Δv r rmax and Δδ f fmax , then use the model predictive control algorithm to obtain the control angle δ 2 , as the control angle to be corrected; otherwise, use the pure tracking algorithm to obtain the control angle δ 1 , as the control angle to be corrected;
[0093] According to the lateral position deviation e between the agent and the target re...
Embodiment 2
[0202] A computer-readable storage medium, including a stored computer program; when the computer program is executed by a processor, the device where the computer-readable storage medium is located is controlled to execute the agent path tracking control method provided in Embodiment 1 above.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More