

Automatic grabbing mechanical arm
A grabbing manipulator and automatic technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of easy slipping of the outer surface, unsuitable grasping of the outer surface, damage of the outer surface, etc., to reduce pressure and protect product, the effect of reducing the distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
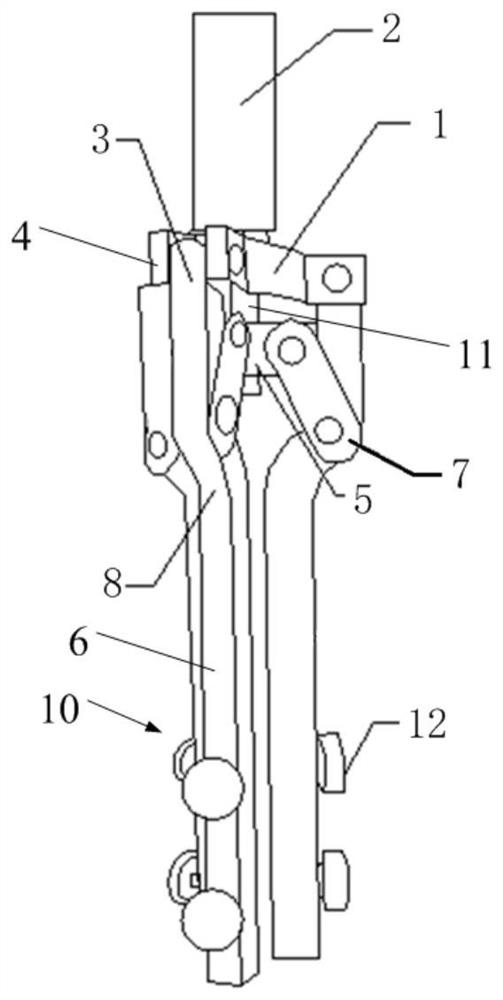
[0049] The invention provides an automatic grasping manipulator, such as figure 1 As shown, it includes: a base 2, and one end of the base 2 is fixed with a driving device 1;
[0050] The side of the base 2 is hinged with at least two sets of internal grasping components 10; the driving end of the driving device 1 is connected with a connecting shaft 11; the center of the base 2 is provided with a through hole that is compatible with the connecting shaft 11; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More