

Underground unmanned aerial vehicle flight method and system
A drone and camera technology, applied in the field of drone flight, can solve problems such as the difficulty of attitude perception of drones, and achieve the effect of fast calculation speed and low application cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
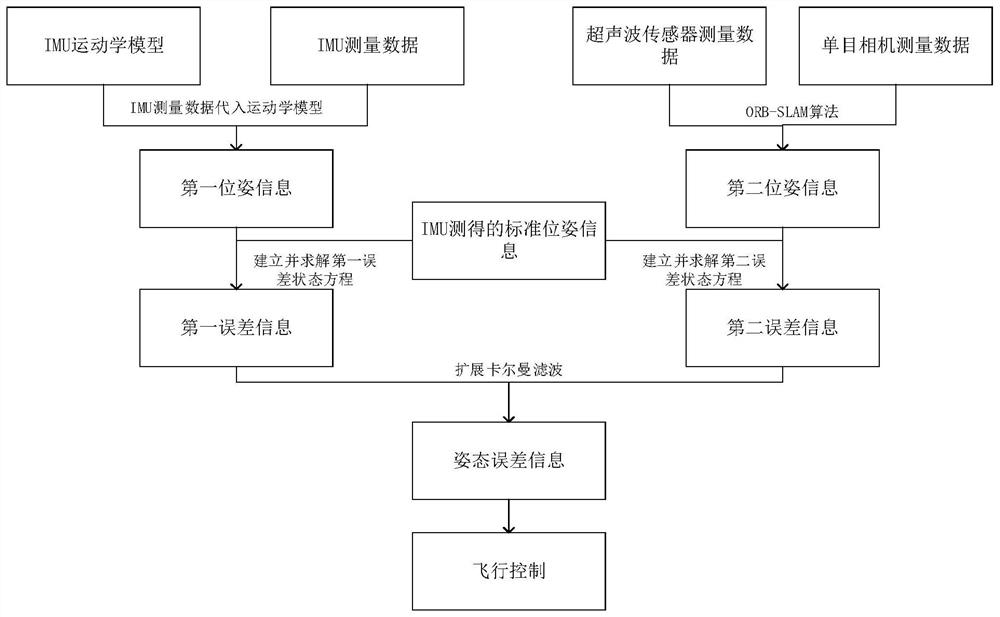
[0033] An underground UAV flying method. The UAV is equipped with a monocular camera, an ultrasonic sensor and an IMU. This application combines the IMU, the monocular camera and the ultrasonic sensor to accurately obtain the pose error of the UAV, so as to better perform attitude Perception and attitude correction, so as to realize the flight control of drones in underground spaces without GPS signals.
[0034] A flow chart of an underground unmanned aerial vehicle flying method such as figure 1 As shown, the IMU can directly measure the standard pose information of the UAV, but as time shifts, the measured value will have an error accumulated over time.
[0035] On the one hand, the present application recalculates the first pose information based on the measurement data of the IMU and the kinematic model of the IMU, and obtains the first error information based on the standard pose information and the first pose information.
[0036] On the other hand, the second pose info...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More