

A finite-time adaptive control method for flight formation based on event-triggered estimation information transmission
A technology of adaptive control and information transmission, applied in the field of formation flight control, can solve problems such as difficult to achieve fast and stable control of the system, and achieve the effect of reducing communication pressure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0105] In order to make the purpose, technical solutions and advantages of the invention more clear and clear, the following combined with the attachment and embodiments to further explain the present invention in detail. It should be understood that the specific embodiments described here are only used to explain the invention and do not limit the present invention. In addition, the technical characteristics involved in the embodiments described below can be combined with each other as long as they do not constitute a conflict between each other.
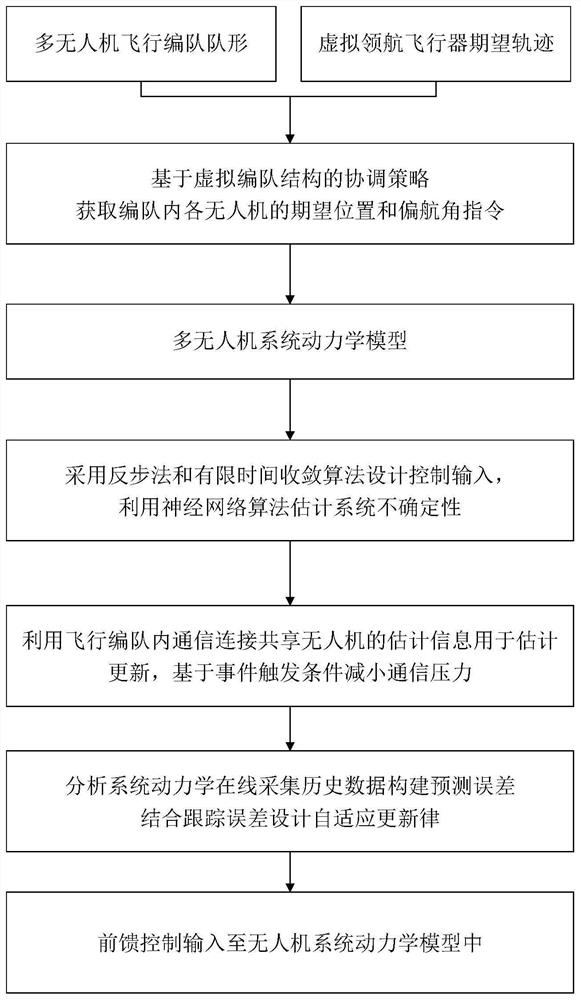
[0106] Reference figure 1 , The invention is an adaptive control method based on an event -based flight formation limited time. The following steps are implemented through the following steps:
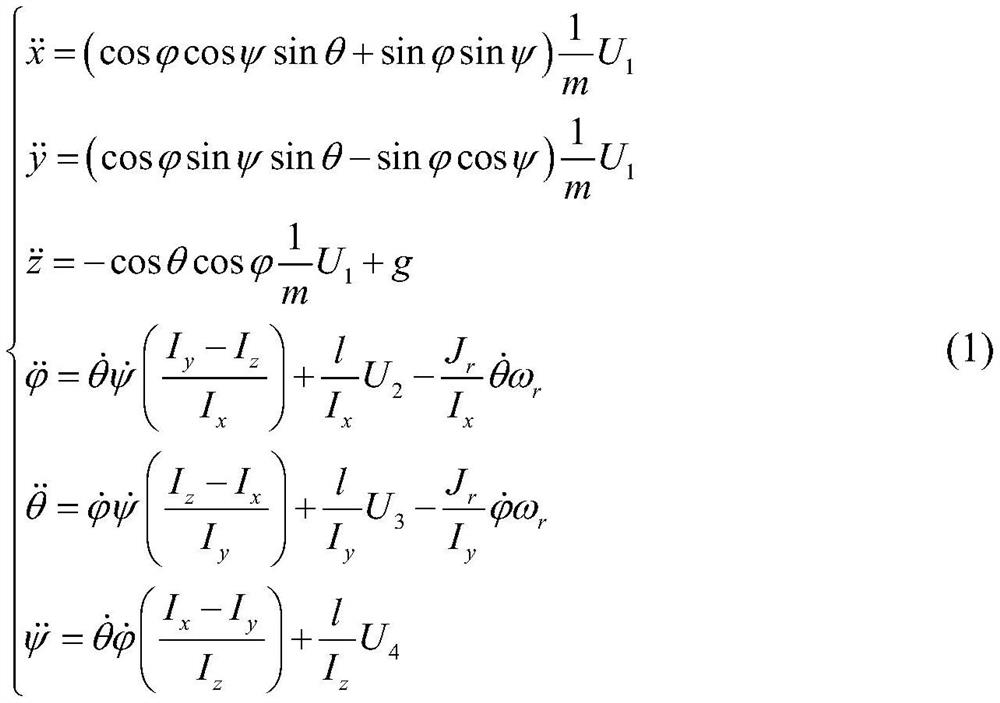
[0107] (A) UAV dynamic model:
[0108]
[0109] In the formula, x, y, z are positions, It is a horizontal roller, θ is pitch angle, ψ is a partial angle, M = 2.3kg is quality, G = 9.81m / s2 For gravity acceleration, i x = 1.676 × 10 -2 kg · m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More