

Vision and IMU sensor fusion positioning system based on dynamic object semantic segmentation
A technology of semantic segmentation and fusion positioning, which is applied in the field of visual positioning, can solve problems such as error matching, scale deviation, and unaligned camera coordinate systems, so as to improve accuracy and robustness, improve cumulative errors, and overcome errors. Effect of Matching Problems and Bad Data Association Problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art belong to the scope of protection of the present invention. In order to facilitate the understanding of the above-mentioned technical solutions of the present invention, the above-mentioned technologies of the present invention will be described below through specific usage methods The plan is described in detail.
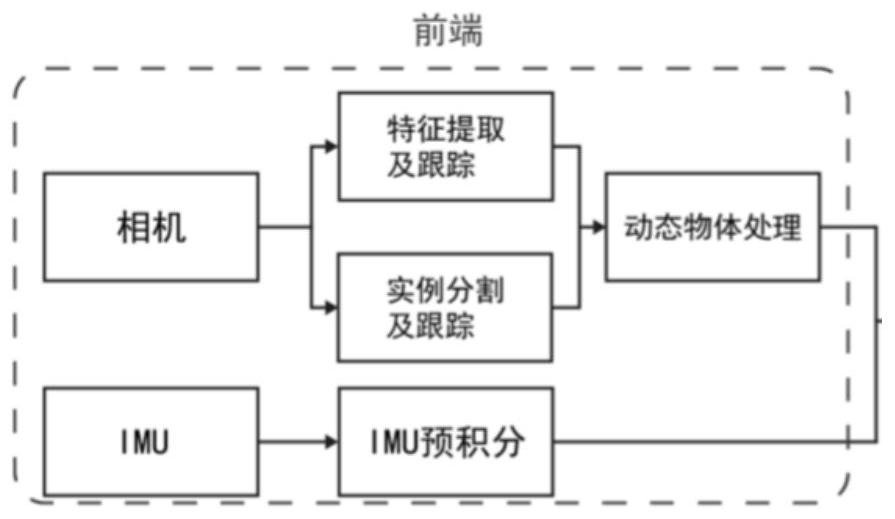
[0032] In the present invention, dynamic object instance segmentation is used to remove dynamic feature points, and fusion with IMU sensor data is used as a front-end method of a visual-inertial positioning algorithm.
[0033] According to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More