

An Online Registration Method for Incomplete 3D Scanning Point Clouds with Planar Datums
A technology of three-dimensional scanning and plane reference, which is applied in image analysis, image enhancement, instruments, etc., to achieve high practical value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
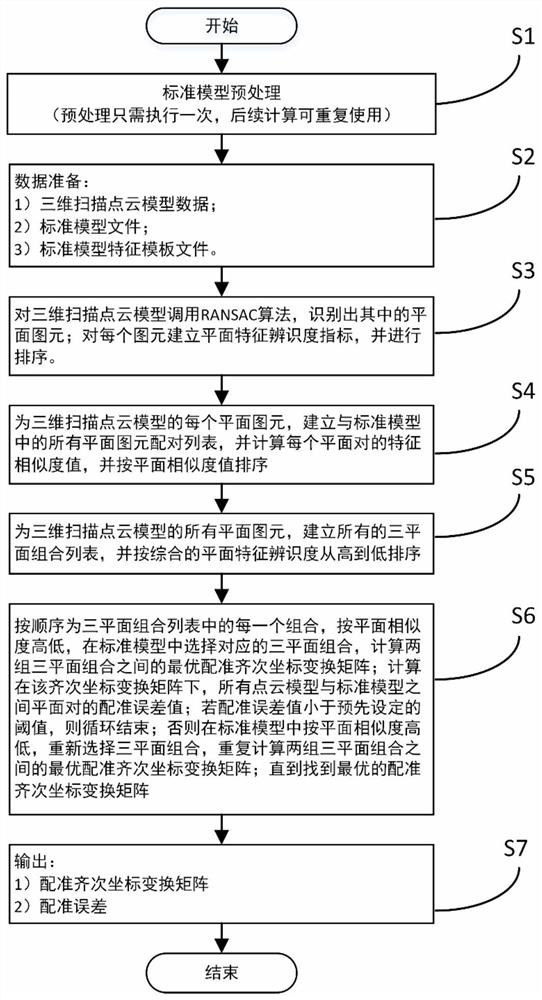
[0033] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0034] First, establish the recognition index R of the plane primitive:
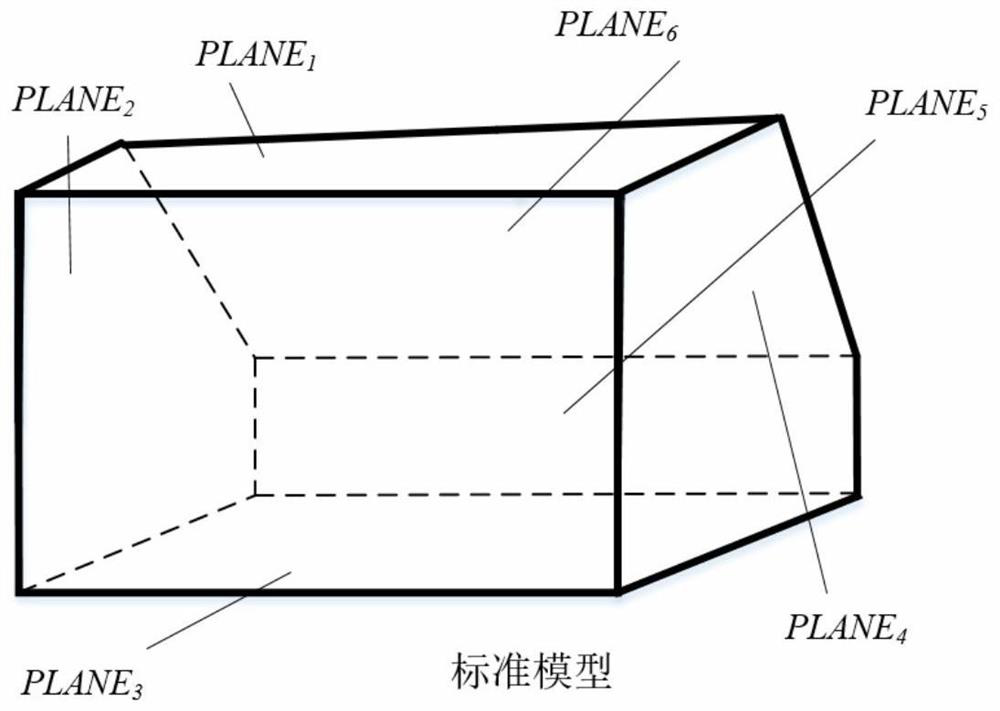
[0035] Given a set of plane primitives {PLANE i}, i=1,...,N, each plane Plane t The data includes:
[0036] P i : the geometric center of the plane profile;
[0037] V i : The normal direction of the plane, pointing to the outside of the entity where the plane is located;
[0038] A i : the area of the plane profile;
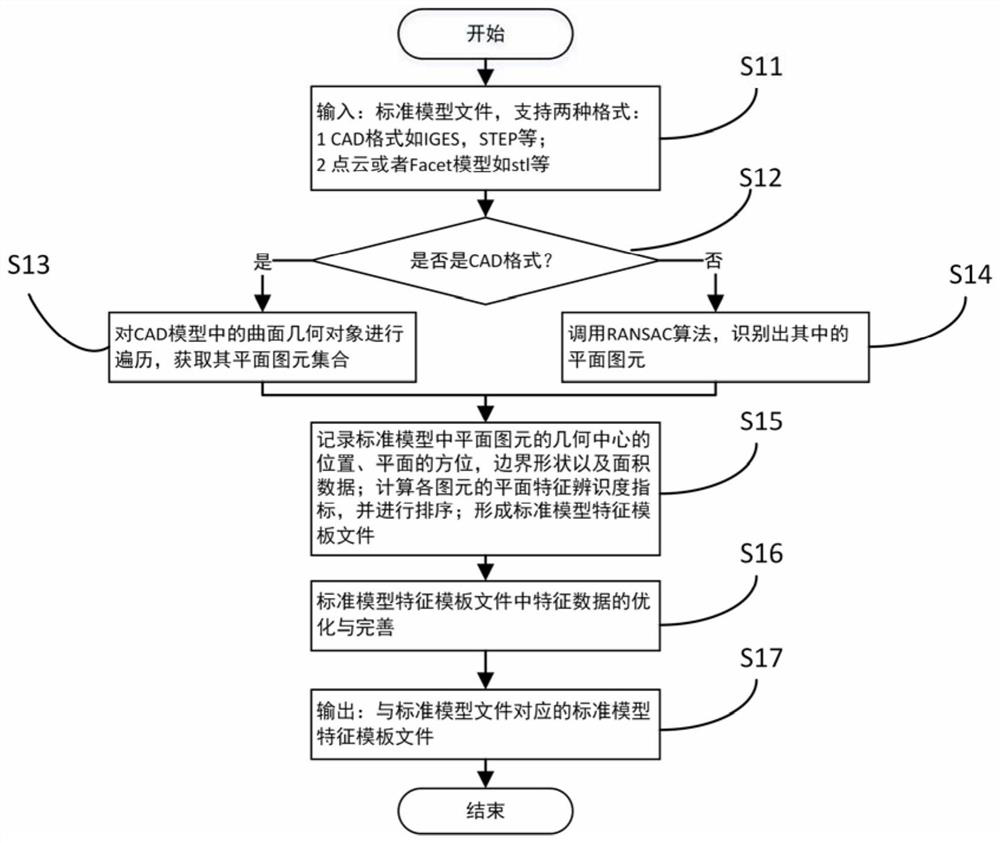
[0039] T l : The fitting error of the identified plane. If the plane comes from a CAD model (BREP or IGES format), then T i = 0; if the plane identified by RANSAC algorithm, then T i is the fitting error value of the identified plane;
[0040] m i : represents the plane in {Plane i} with the number of parallel planes (including this plane), if the plane is in {...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More