

Unmanned aerial vehicle route planning method suitable for agricultural investigation
A route planning and unmanned aerial vehicle technology, applied in computer parts, instruments, characters and pattern recognition, etc., can solve the problems of environmental interference, different heights of trees, uneven distribution of field sizes, etc., to improve work efficiency, improve Universal effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
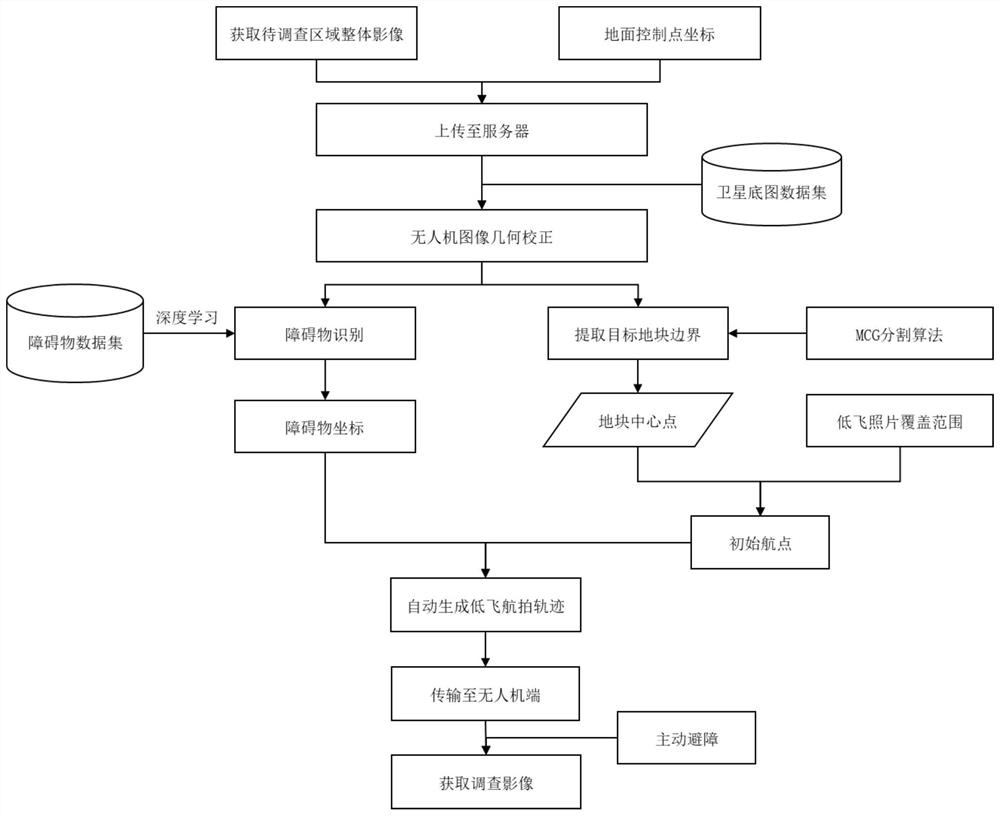
[0034] see Figure 1-Figure 3 , the present embodiment provides a route planning method for unmanned aerial vehicles suitable for agricultural surveys, including the following steps:
[0035] Step S1: Obtain the first image and the second image of the area to be investigated by the drone, and at the same time obtain the ground control point ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More