

UAV Autonomous Navigation and Resource Scheduling Method for Wireless Self-Powered Communication Network
A communication network and resource scheduling technology, applied in the field of unmanned aerial vehicle energy supply communication network, can solve problems such as unconsidered unmanned aerial vehicle energy transmission and data collection tasks, and achieve the effect of realizing energy supply and increasing the amount of transmitted data
Active Publication Date: 2022-05-31
UNIV OF ELECTRONICS SCI & TECH OF CHINA
View PDF7 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0004] However, in the current technology, it is usually based on the known position of ground equipment, and the energy transmission and data collection tasks of UAVs in unknown environments have not been considered.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
[0040] The technical scheme of the present invention is further described below in conjunction with the accompanying drawings.
[0045] The channel model is the Los channel; at time t, the two-dimensional coordinates of the drone are q(t)=(x(t), y(t)). Fake
[0050]
[0051]
[0053]
[0054]
[0055]
[0056]
[0067] Input: iteration number F, state feature dimension n, action set A, decay factor γ, exploration rate ε, learning rate Q net
[0075]
[0077] y
[0081] Those of ordinary skill in the art will appreciate that the embodiments described herein are intended to assist the reader in understanding the present invention.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
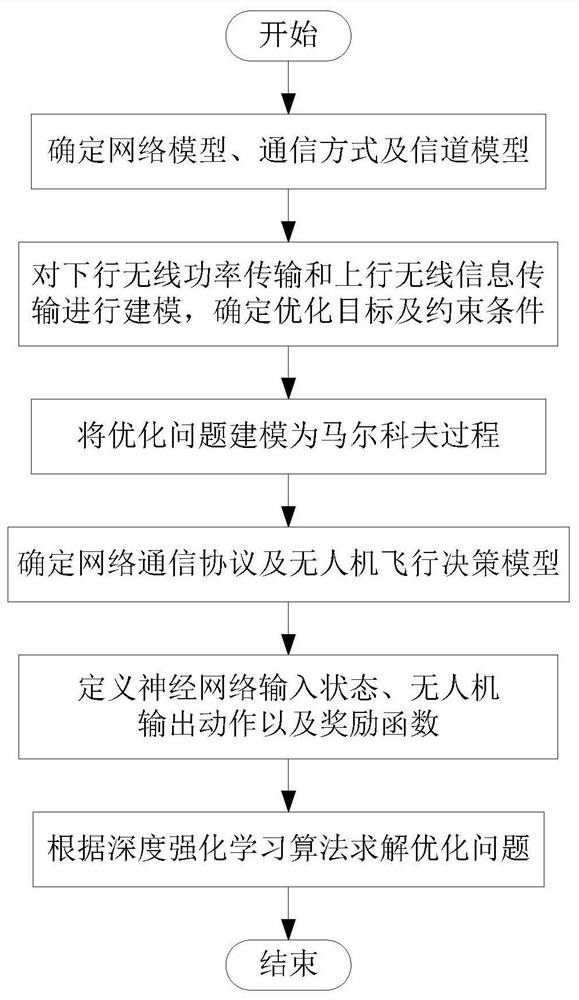
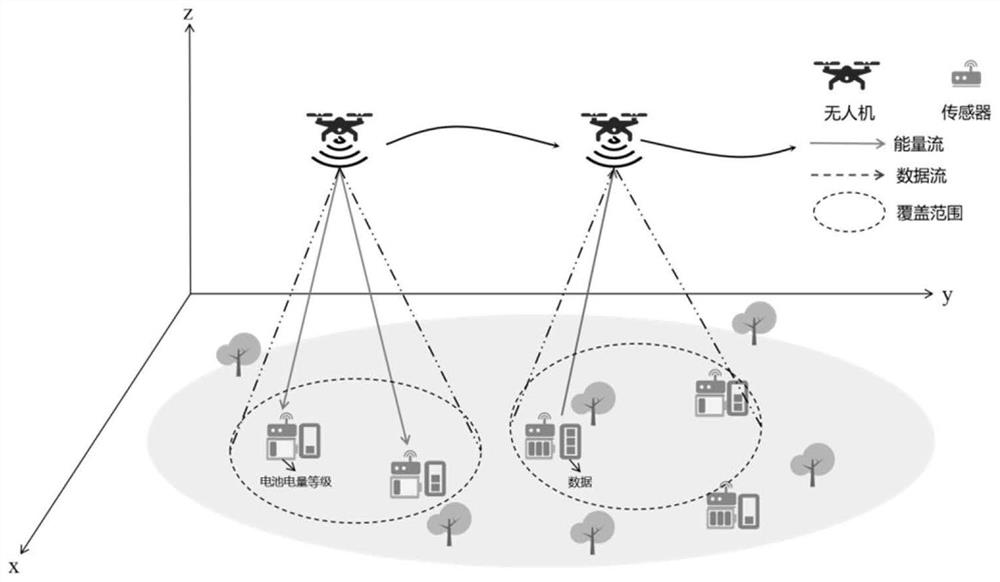
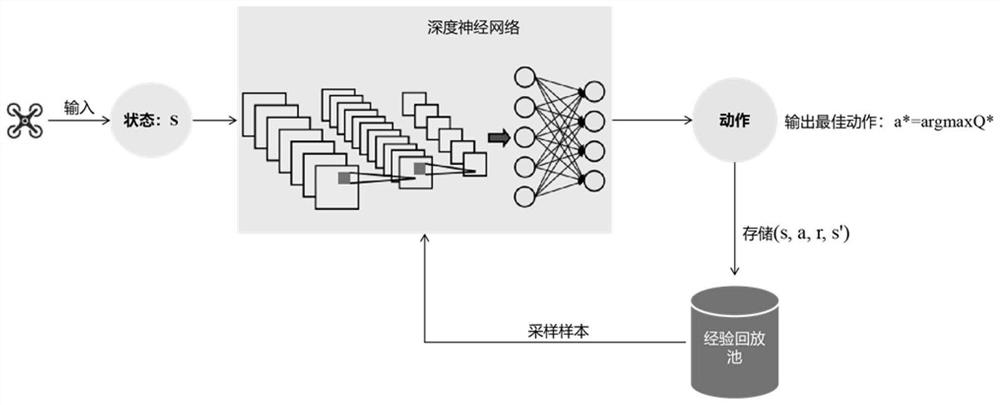
The invention discloses a method for autonomous navigation and resource scheduling of an unmanned aerial vehicle in a wireless self-powered communication network, comprising the following steps: S1, determining a network model, a communication mode, and a channel model; S2, transmitting downlink wireless power and uplink wireless information Carry out modeling, and determine the optimization target expression and its constraints; S3, analyze the optimization problem, and model the optimization problem as a Markov process; S4, determine the network communication protocol and the UAV flight decision model; S5, define the neural network Network input state, UAV output action and reward function; S6, solve the optimization problem according to the deep reinforcement learning algorithm. The present invention not only realizes the energy supply to multiple ground devices, but also takes into account the wireless self-powered communication network by jointly designing three parts: the flight track of the drone, the selection of the ground equipment, and the communication mode with the ground equipment. Maximizing average data volume across multiple devices in a self-powered communication network.
Description
Autonomous Navigation and Resource Scheduling Method for Unmanned Aerial Vehicles Based on Wireless Self-Powered Communication Network technical field The invention belongs to the unmanned aerial vehicle energy supply communication network technical field, be specifically related to a kind of wireless self-powered communication network UAV autonomous navigation and resource scheduling method. Background technique [0002] Wireless sensor networks (WSNs) can be used to collect information about the surrounding environment. devices in wireless sensor networks The power of the sensor is limited. When it is exhausted, the sensor is charged by artificial means or traditional ground communication network. Electrical efficiency is very low. While radio frequency (RF) based energy harvesting (EH) can be viewed as extending the use of energy-constrained sensor devices An expected scheme of lifespan. Wireless Power Transfer (WPT) via RF radiation can provide low-power IoT dev...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): G06F30/27G06N3/04G06N3/08H04W4/38H04W16/22H04W28/02H04W28/06G06F111/02G06F111/04G06F111/08
CPCG06F30/27G06N3/04G06N3/084H04W4/38H04W16/22H04W28/0226H04W28/06G06F2111/04G06F2111/02G06F2111/08Y02T10/40
Inventor胡杰李雨婷于秦杨鲲
OwnerUNIV OF ELECTRONICS SCI & TECH OF CHINA