

Multi-camera vision SLAM method based on observability optimization
A multi-camera vision and camera technology, applied in image analysis, instrumentation, computing, etc., can solve the problem of weak restoration of the real world scale, and achieve the effect of improving feature matching results, improving accuracy and reliability, and robust real-time positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0059] The accompanying drawings provided in this implementation case can only illustrate the basic idea of the present invention, and only show the components related to this implementation case, and are not drawn according to the number and size of components during actual implementation. The shape and quantity of each component in the actual implementation process Can be changed at will.
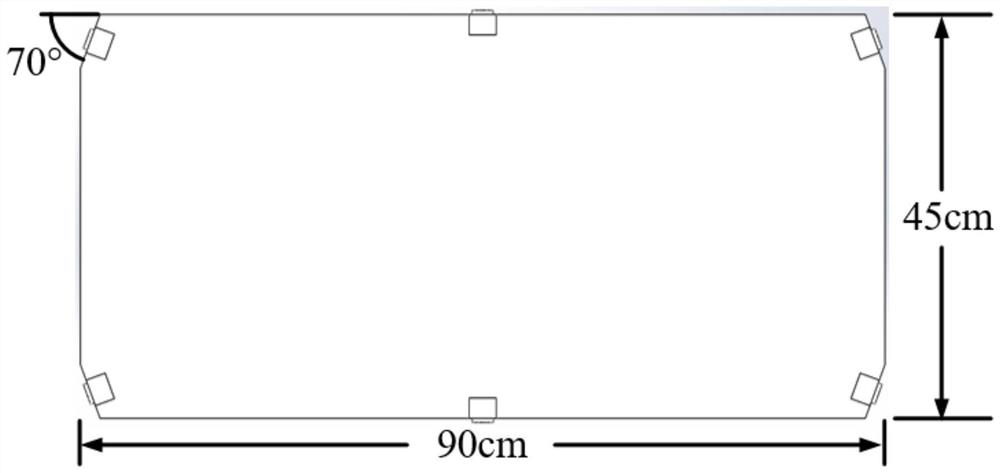
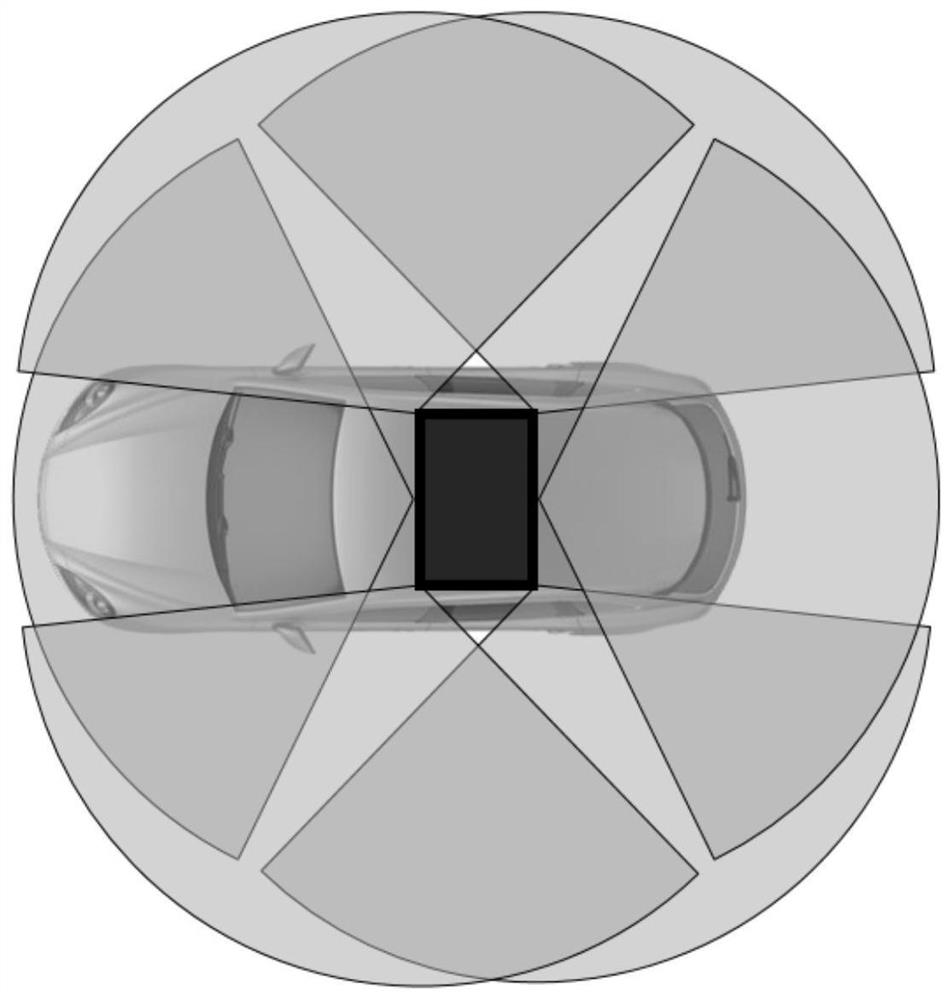
[0060] This implementation case provides a multi-camera visual SLAM method based on observability optimization. The hardware structure diagram used in this method is as follows figure 1 As shown, the figure shows a multi-camera vision system composed of 6 cameras, and the baseline length between adjacent cameras is about 45cm; figure 2 It is a schematic diagram of the installation and arrangement of the multi-camera vision system on the carrier. The horizontal field of view of each camera is about 120°. According to the requirements of the multi-camera vision system in the present inve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More