Double-layer pneumatic spiral soft body actuator with variable stiffness
A technology for actuators and variable stiffness, which is applied in the field of double-layer pneumatic helical soft actuators, which can solve the problems of increasing the contact area with the object when grasping, limited load capacity, and increasing the adhesive force between the actuator and the object.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0028] Introduce technical scheme of the present invention in detail below in conjunction with accompanying drawing and embodiment example:
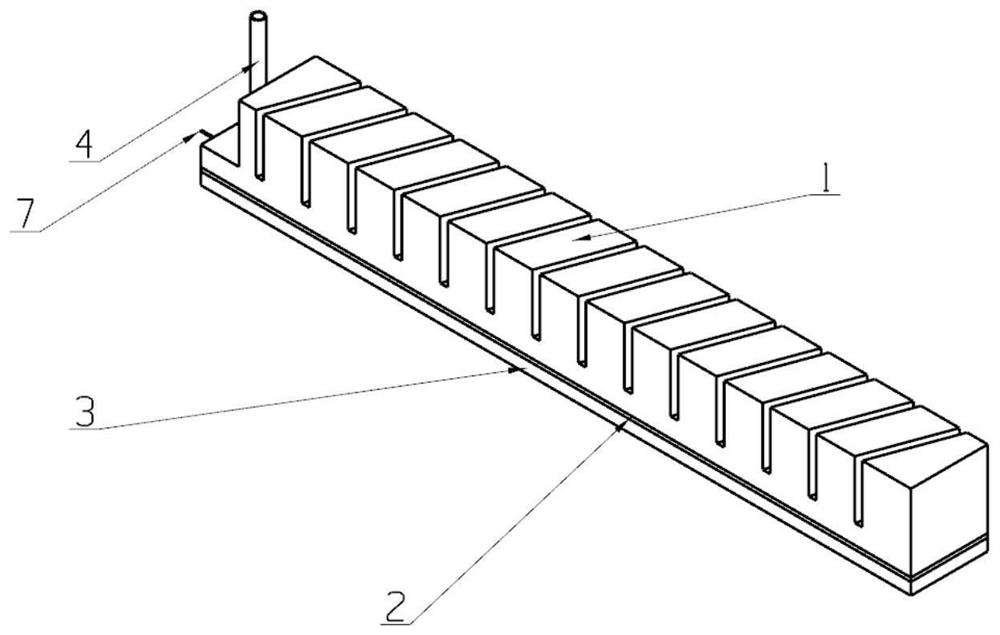
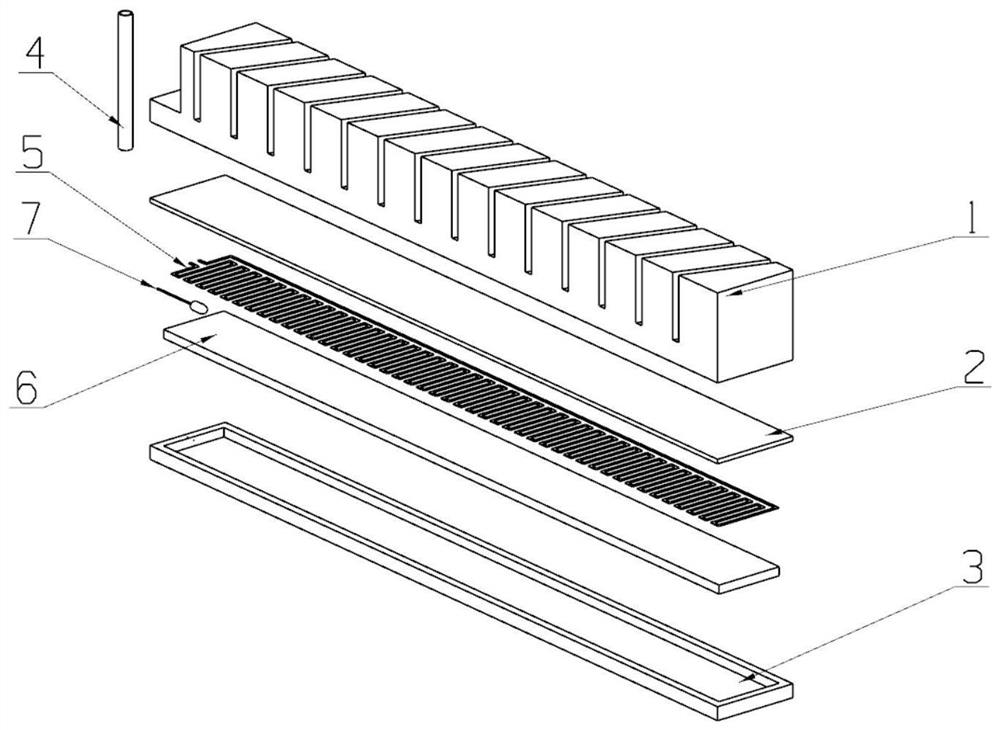
[0029] Such as figure 1 with 2 As shown, the soft actuator includes a pneumatic soft actuator body 1, an air duct 4, and a variable stiffness module; the air duct 4 is fixedly installed at the end of the pneumatic soft actuator body 1, and the variable stiffness module is fixedly installed on the pneumatic soft actuator body 1 The bottom of the pneumatic soft actuator body; the variable stiffness module is attached to the bottom of the pneumatic soft actuator body through 3M VHB double-sided adhesive tape. The soft actuator is connected to the external auxiliary device through the air guide tube 4. The external auxiliary device includes a solenoid valve, an air pump, a power supply and a control device. The external auxiliary device is used to provide and control the air pressure required for the helical deformation of the soft actuator...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com