

Calibration method of artillery aiming performance parameter testing system
A parameter testing and data acquisition system technology, which is applied in the field of calibration of the artillery aiming performance parameter testing system, can solve problems such as the lack of accurate and fast calibration methods, and achieve the effect of ensuring calibration accuracy and improving work precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
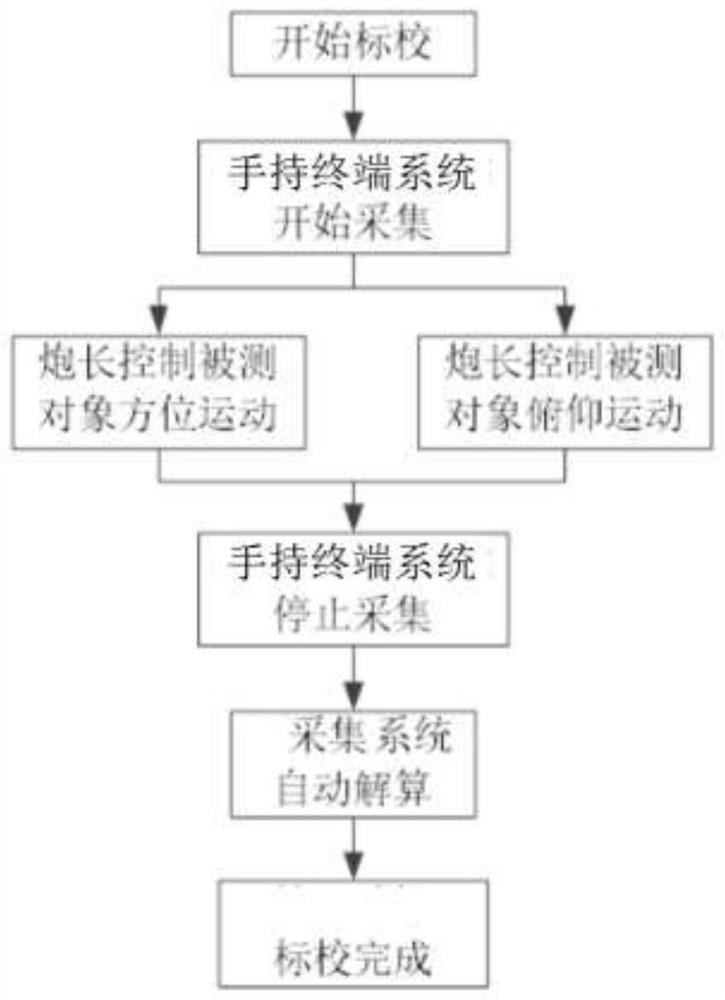
[0092] The present invention also provides another implementation method, which includes the following steps:
[0093] S201. Start the handheld terminal system, and start the data collection system;
[0094] S202. Control the azimuth movement of the measured object to drive the sensor to move;
[0095] S203. Stop the handheld terminal system, and complete the azimuth data collection;
[0096] S204. Start the handheld terminal system, control the pitching movement of the measured object, and drive the sensor to move;
[0097] S205. Stop the handheld terminal system, stop the data collection system, and complete the pitch data collection;
[0098] S206. According to the azimuth data and the pitch data, the data acquisition system completes the calibration by using a calibration method for the artillery aiming performance parameter testing system.
[0099] The present invention also provides another implementation method, which includes an external hand-held control switch, an...
Embodiment
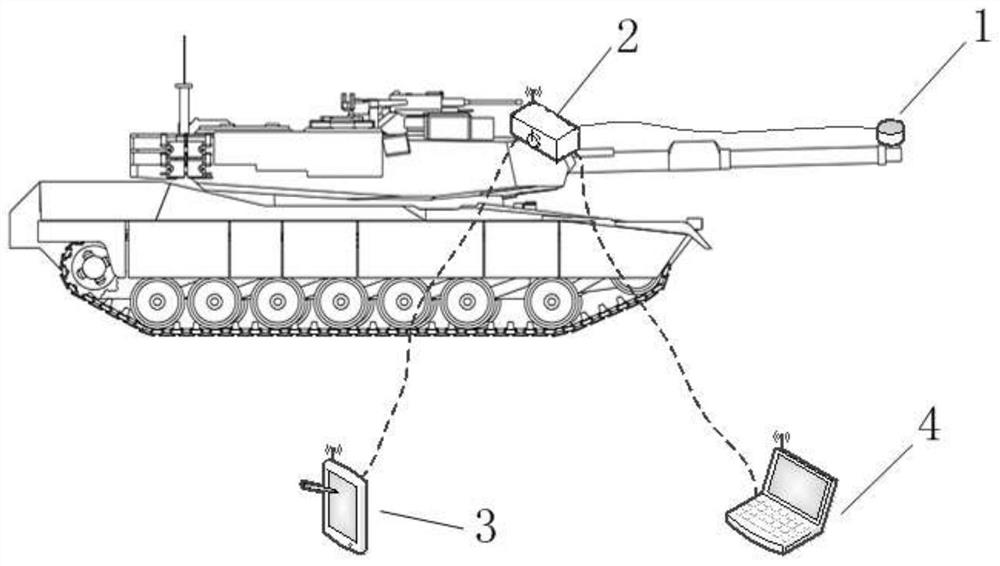
[0109] Such as figure 1 As shown, the MEMS gyroscope is fixed on the muzzle as the sensor 1, and the MEMS gyroscope transmits the acquired motion data to the data acquisition system 2, and the handheld terminal system 3 and the data processing system 4 can respectively control the data collected by the data acquisition system 2 from the sensor 1. to collect. There are three calibration modes in this embodiment.
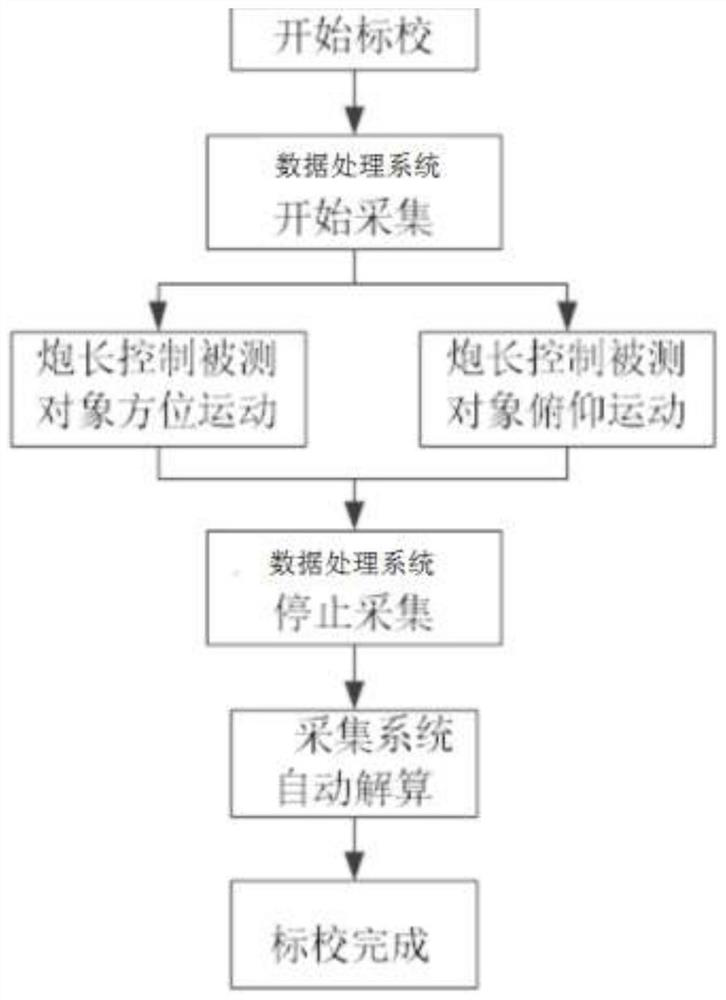
[0110] Such as figure 2 As shown, the normal mode calibration process of the test system:
[0111] 1. Test preparation;
[0112] 2. The tester clicks the "system calibration" function key on the data processing system 4 to start the system calibration;
[0113] 3. The gunner controls the azimuth movement of the measured object and drives the sensor 1 to move;
[0114] 4. The tester clicks the "system calibration" function key on the data processing system 4 again to complete the data collection;
[0115] 5. Repeat step 2, the gunner controls the pitching moveme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More