

Three-dimensional negative Poisson's ratio structure suitable for 3D printing
A negative Poisson's ratio, 3D printing technology, applied in the direction of processing and manufacturing, additive processing, etc., can solve the problems of negative Poisson's ratio structure cannot be formed, structure manufacturability limitations, etc., to achieve the effect of stable platform stress and high performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
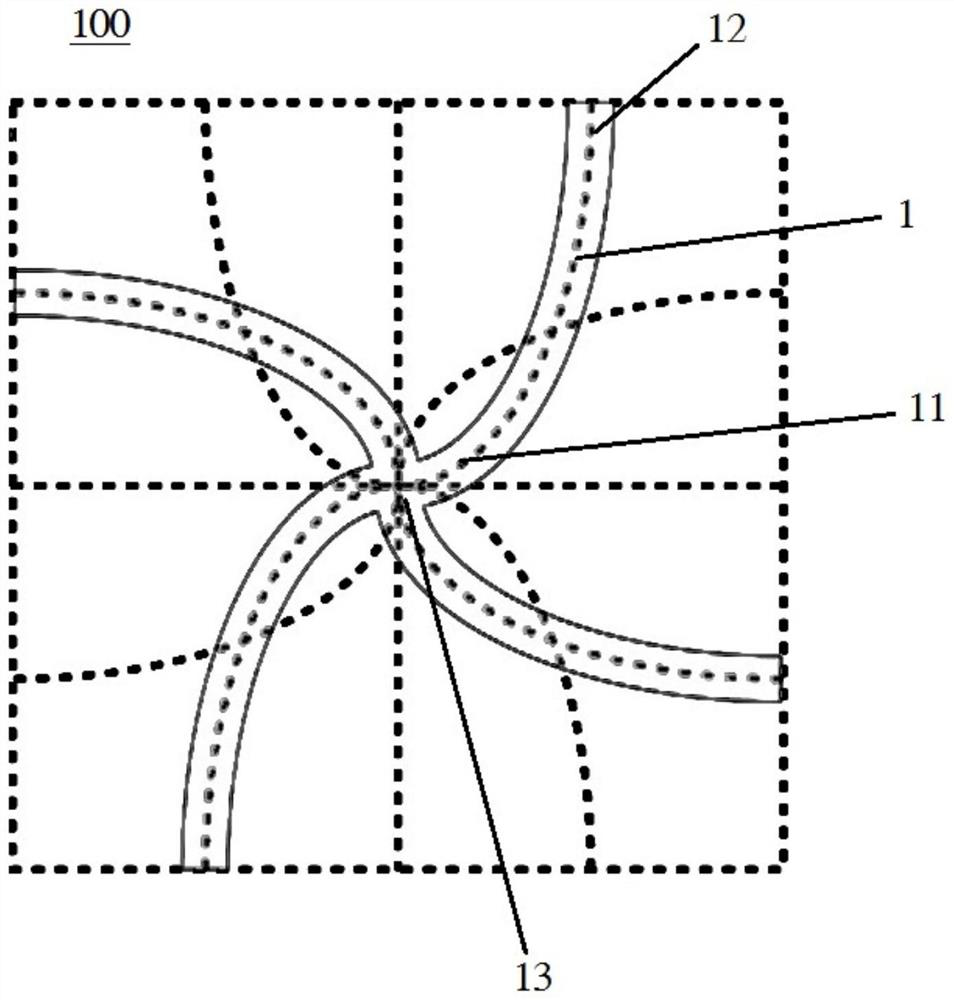
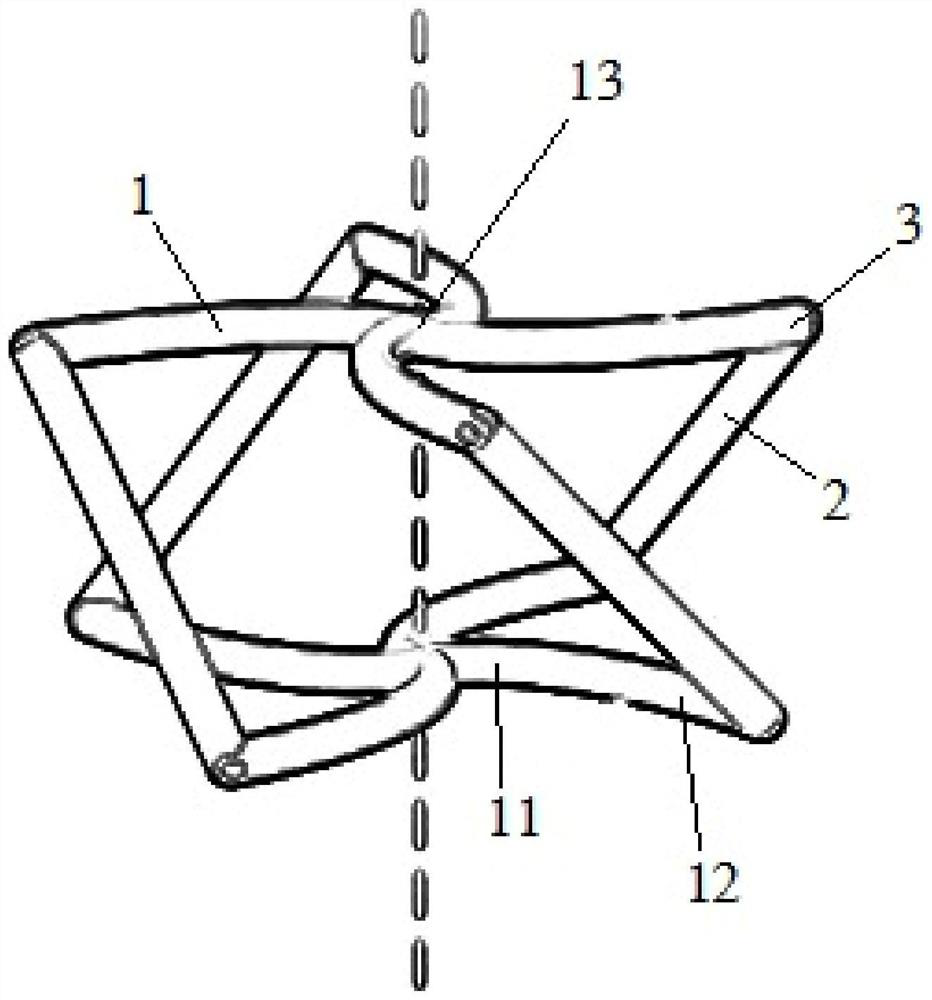
[0031] Example 1, see Figure 7 a- Figure 7 c, the number of helical arms 1 of each helical unit 100 is three, the planar helical structure takes the inner end 11 of the helical arm 1 as the center of rotation, and the helical arm 1 takes 120° as the step size circular array 3 times to obtain the helical unit 100 , the two adjacent spiral units 100 on the X-axis, Y-axis and Z-axis (up and down) are mirror images, and the upper and lower adjacent spiral units 100 are connected by three inclined rods 2, and the upper and lower ends of the inclined rods 2 are respectively connected to the spiral The outer ends 12 of the unit 100 are connected.
Embodiment 2
[0032] Example 2, see Figure 7 d- Figure 7 f, the number of helical arms 1 of each said helical unit 100 is four, the planar helical structure takes the inner end 11 of the helical arm 1 as the center of rotation, and the helical arm 1 takes 90° as the step-length circular array 4 times to obtain the helical unit 100 , the two adjacent spiral units 100 on the X-axis, Y-axis and Z-axis (up and down) are mirror images, and the upper and lower adjacent spiral units 100 are connected by four inclined rods 2, and the upper and lower ends of the inclined rods 2 are respectively connected to the spiral The outer ends 12 of the unit 100 are connected.
Embodiment 3
[0033] Example 3, see Figure 7 g- Figure 7 i, the number of helical arms 1 of each said helical unit 100 is six, the planar helical structure takes the inner end 11 of the helical arm 1 as the center of rotation, and the helical arm 1 takes 60° as the step size circular array 6 times to obtain the helical unit 100 , the two adjacent spiral units 100 on the X-axis, Y-axis and Z-axis (up and down) are mirror images, and the upper and lower adjacent spiral units 100 are connected by six inclined rods 2, and the upper and lower ends of the inclined rods 2 are respectively connected to the spiral The outer ends 12 of the unit 100 are connected.
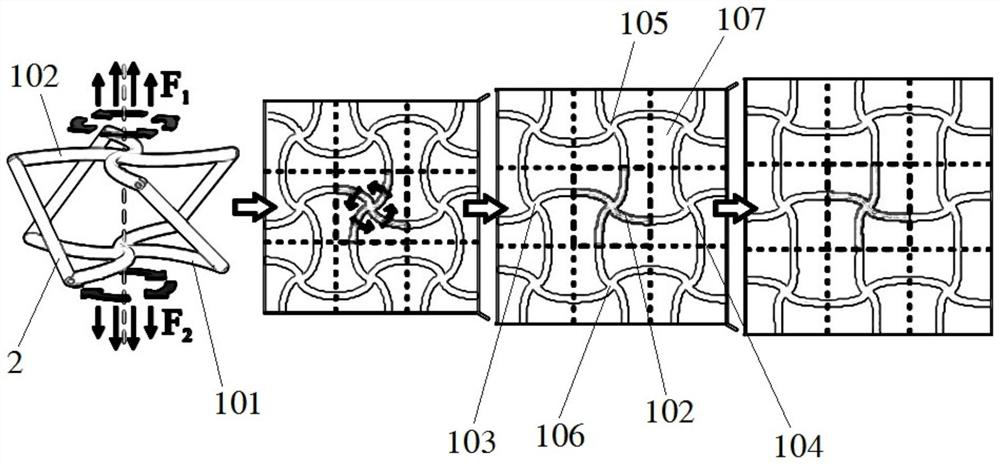
[0034] Taking Embodiment 2 as an example, when a reverse load is applied to the screw unit 100 in the Z-axis direction (pull the upper screw unit 102 upward, and pull the lower screw unit 101 downward), for example, please refer to image 3, the lower screw unit 101 below the tilt rod 2 rotates clockwise, and the upper screw unit 102 a...
PUM
| Property | Measurement | Unit |
|---|---|---|
| angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More