

Path planning method of improved A* algorithm based on graph preprocessing
A path planning and preprocessing technology, applied in two-dimensional position/channel control, vehicle position/route/height control, non-electric variable control, etc., can solve the problem of non-optimal planning path and A* algorithm neighborhood search efficiency low level problem
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] 5.1 Map preprocessing
[0019] 5.1.1 Map Segmentation
[0020] (1) Transform multi-connected concave polygons into single-connected concave polygons
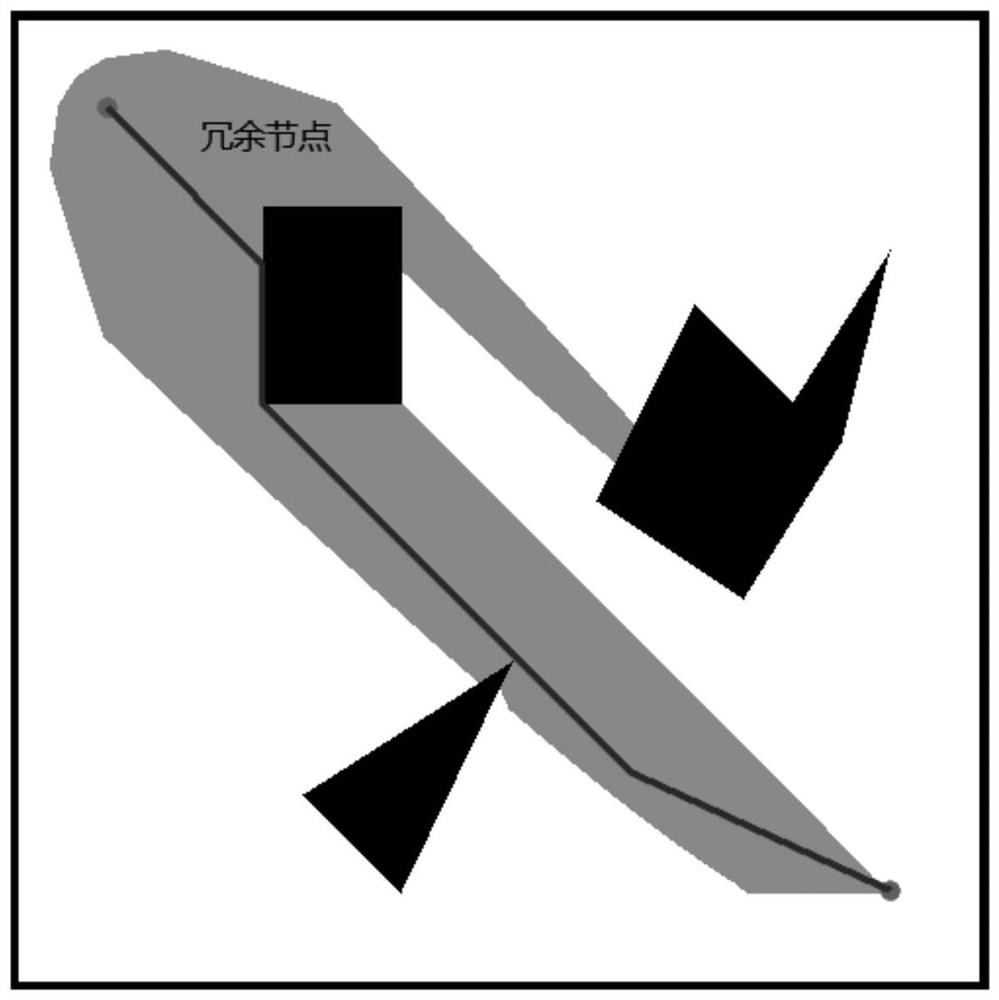
[0021] A map containing obstacles can usually be regarded as a multi-connected concave polygon. In this paper, a virtual auxiliary line connecting obstacles and map boundary vertices is introduced to transform the multi-connected concave polygon into a single-connected concave polygon. Such as image 3 As shown, when the map M 1 m 2 …M n There is an obstacle O in 1 o 2 …O n , choose a point O of the obstacle i A certain vertex M on the boundary of the map i connection, denoted as O i m i . Its vector can have two directions with Assuming two vectors and There is a distance ΔD→0 between them, and the vertex O of the obstacle i Vertex M of the map with i Connected by two vectors, the map becomes a simply connected domain map M 1 m 2 …M i o i o i+1 …O n o 1 …O i m i …M n .
[0022] If there a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More