

Intelligent setting method for attitude control parameters of carrier rocket
A technology of launch vehicle and attitude control, applied in electric controllers, controllers with specific characteristics, etc., can solve the problems of unsatisfactory search accuracy of global optimal results, low accuracy of global optimal results, and reduced convergence performance, etc. Achieve the effect of enhancing the global optimization ability, improving the probability of global optimization, and fast convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0147] Using the test function to verify the solution accuracy and convergence of the quantum salp algorithm
[0148] In order to verify the improvement effect of the improved algorithm in terms of solution accuracy and convergence, the standard test function two-dimensional F1 function and Ackley function were selected to compare the effect of the algorithm before and after the improvement. Based on the two function calculation methods for the problem of the minimum value, the obtained The objective function is Y=f(X)=-g h (X)h=G, R,; the mathematical expressions and global optimal solutions of the two standard test functions are given in Table 1.
[0149] Assuming that there are N quantum salps in the quantum salp group, F=(X Q1 ,X Q2 ,...,X Qi ,...,X QN ), 1≤i≤N, the state X of each individual quantum salp Q Parameter X of available test functions Q =(θ 1 ,θ 2 ) is the optimization design variable; [Down k ,Up k ] is the optimization range of the kth design variab...
Embodiment 2
[0170] Feasibility verification of quantum salp algorithm launch vehicle attitude control parameter tuning
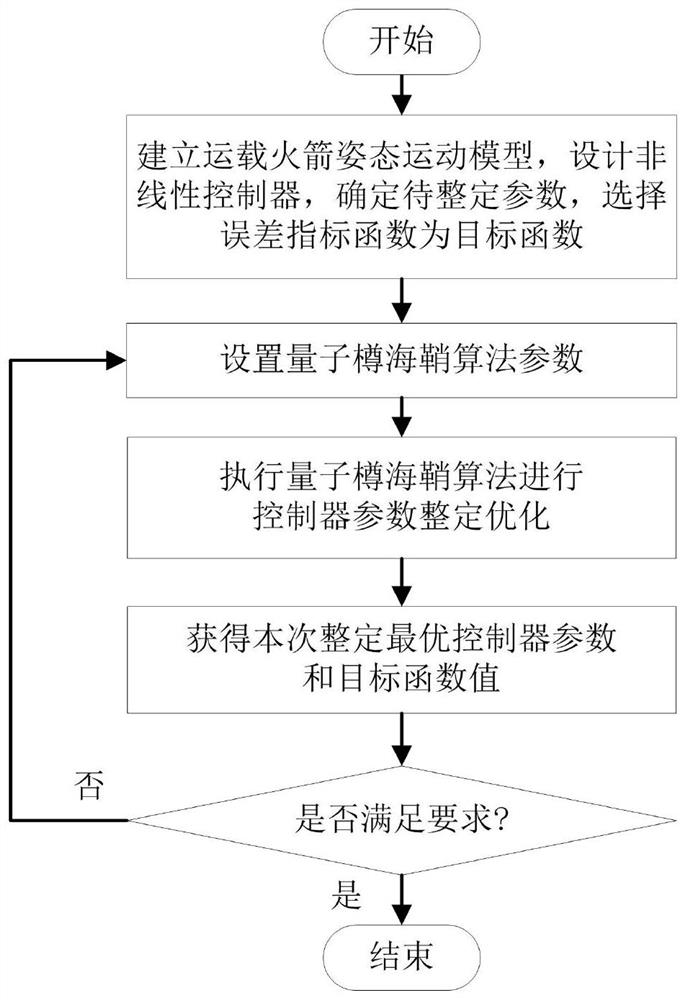
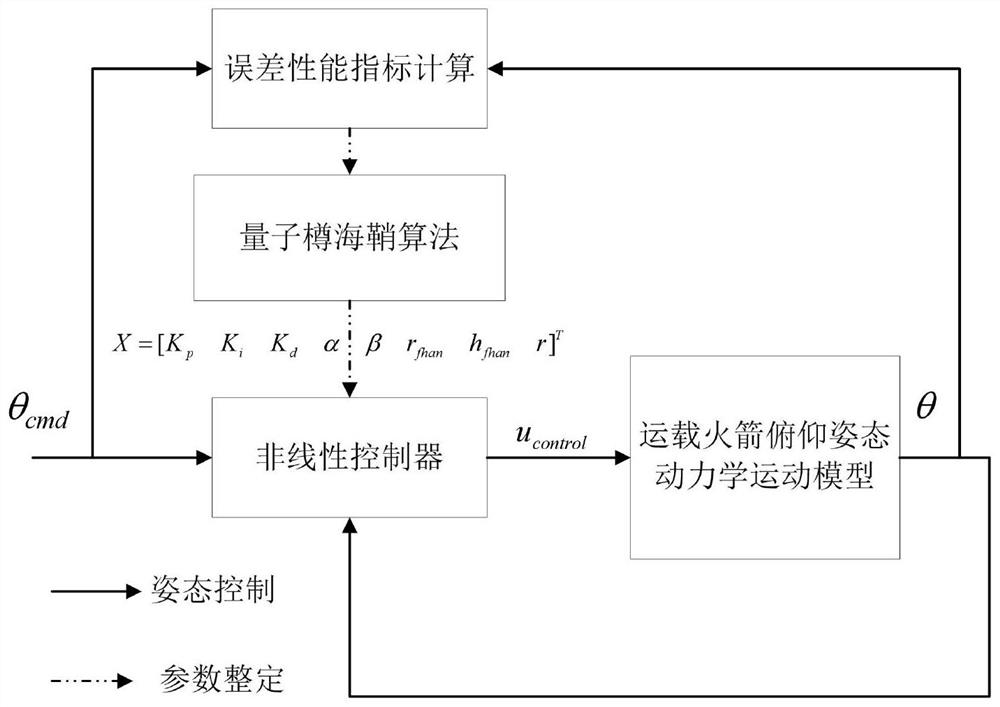
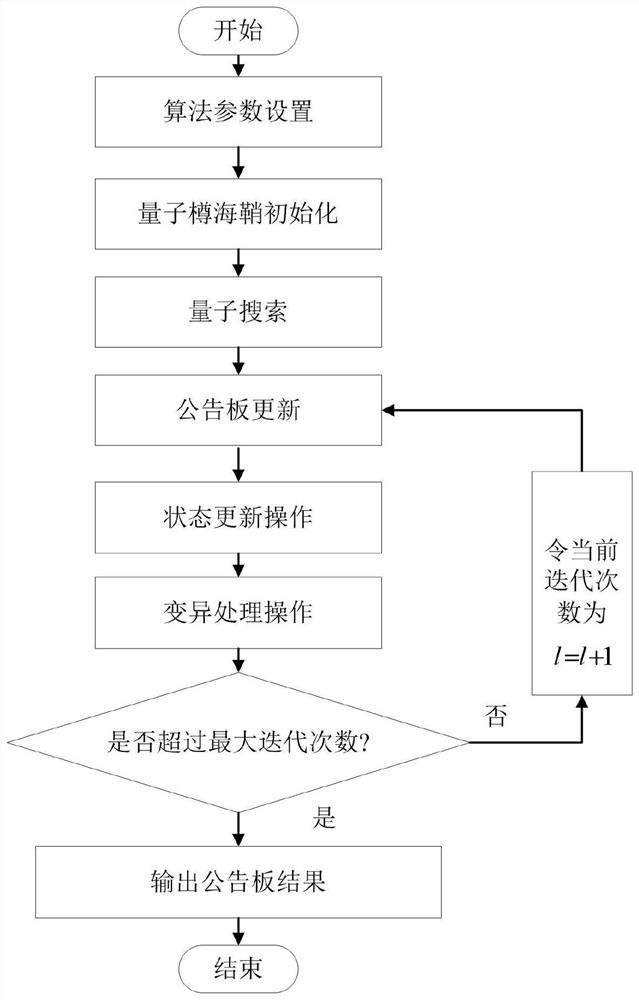
[0171] Refer to attached Figure 1-7 , the specific implementation steps of the inventive method are as follows:
[0172] Step 1. Establish the attitude motion model of the launch vehicle and obtain the nominal data:
[0173] 1. Rigid body motion modeling of launch vehicle
[0174] According to the analysis of the attitude motion of the launch vehicle and in view of the symmetrical characteristics of the launch vehicle, the motion model of the rocket pitch channel is established, which consists of three parts: rigid body motion, elastic motion and attitude measurement.
[0175] The equation of motion for a rigid body is:
[0176]
[0177]
[0178]
[0179] The elastic vibration equation is:
[0180]
[0181] The inertial measurement equation is:
[0182]
[0183]
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More