Path optimization method based on dynamic window and redundant node filtering
A redundant node and dynamic window technology, which is applied in motor vehicles, transportation and packaging, control/regulation systems, etc., can solve problems such as low efficiency, and achieve high efficiency, high accuracy, improved safety and smoothness of movement Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The following describes in detail the embodiments of the present invention with reference to the accompanying drawings.
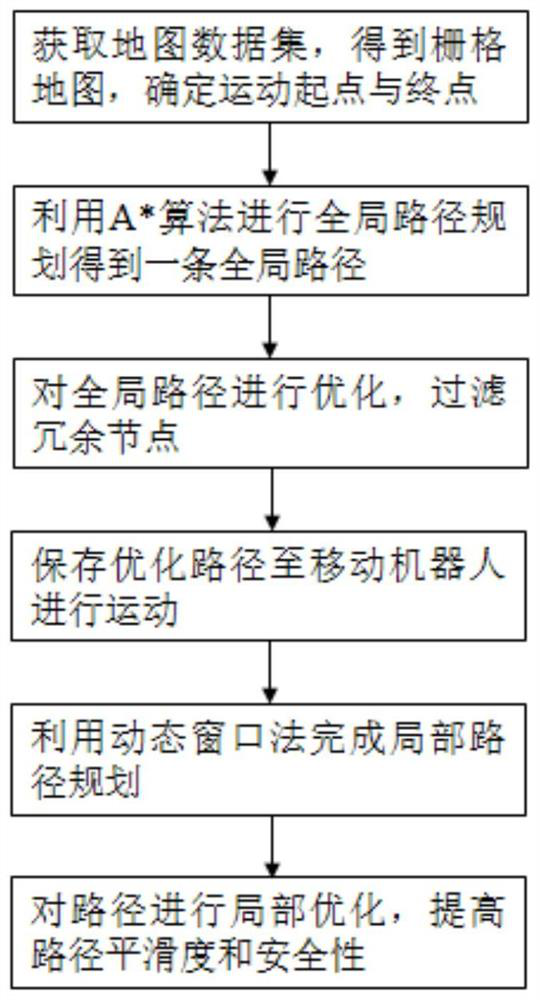
[0045] see Figure 1-3 , a path optimization method based on dynamic window and redundant node filtering, including the following steps:
[0046] S100: Use the existing grid map data set to determine the coordinate information of the starting position and target position of the movement, and mark the target node and obstacle node in the grid map; the map data set can be measured by manual measurement, remote sensing, It can be obtained through photogrammetry, satellite data, etc., and can also be obtained by repeatedly collecting map information in an unknown environment by operating a mobile robot.
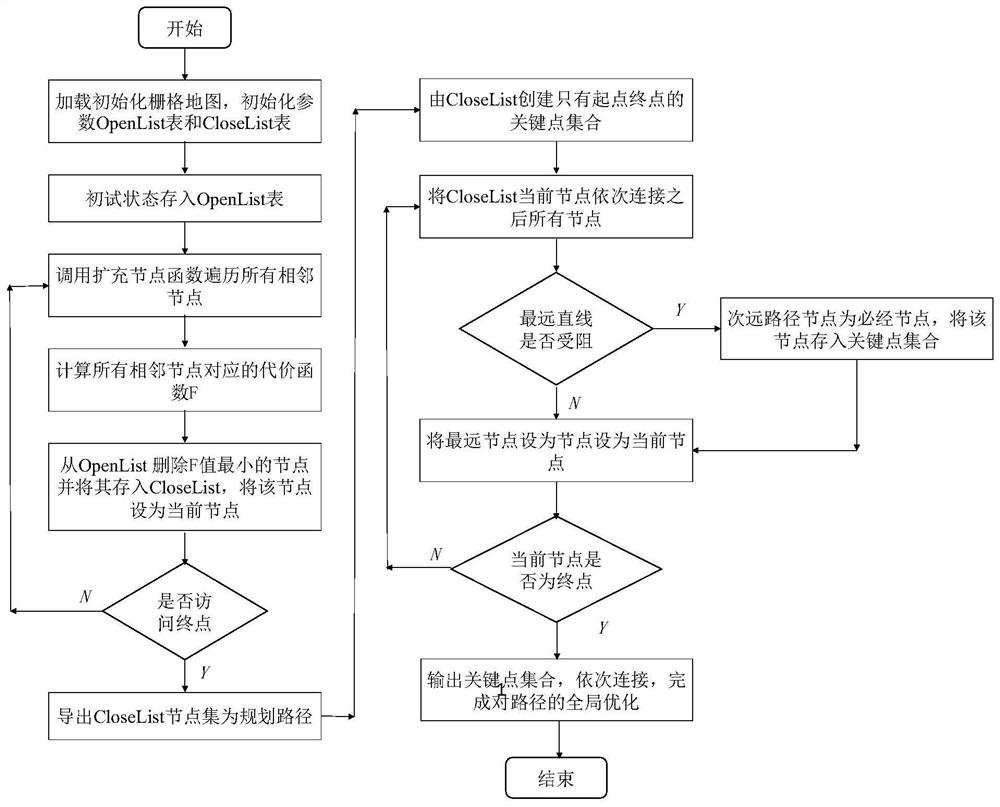
[0047] S200: use A * The algorithm plans a global path, including the following steps:
[0048] S210: Construct and initialize two empty tables OpenList and CloseList, set the starting position as the current node and store it in the OpenList list; i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More