

Self-adaptive robust trajectory tracking control method for quad-rotor unmanned aerial vehicle
A four-rotor unmanned aerial vehicle, self-adaptive and robust technology, applied in the direction of adaptive control, general control system, control/regulation system, etc. Unsatisfactory machine tracking performance and other problems, to eliminate overshoot, improve stability and robustness, and suppress chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0122] The present invention will be described in detail below with reference to the drawings and embodiments. At the same time, the technical problems and beneficial effects solved by the technical solution of the present invention are also described. It should be pointed out that the described embodiments are only intended to facilitate the understanding of the present invention, and have no limiting effect on it.
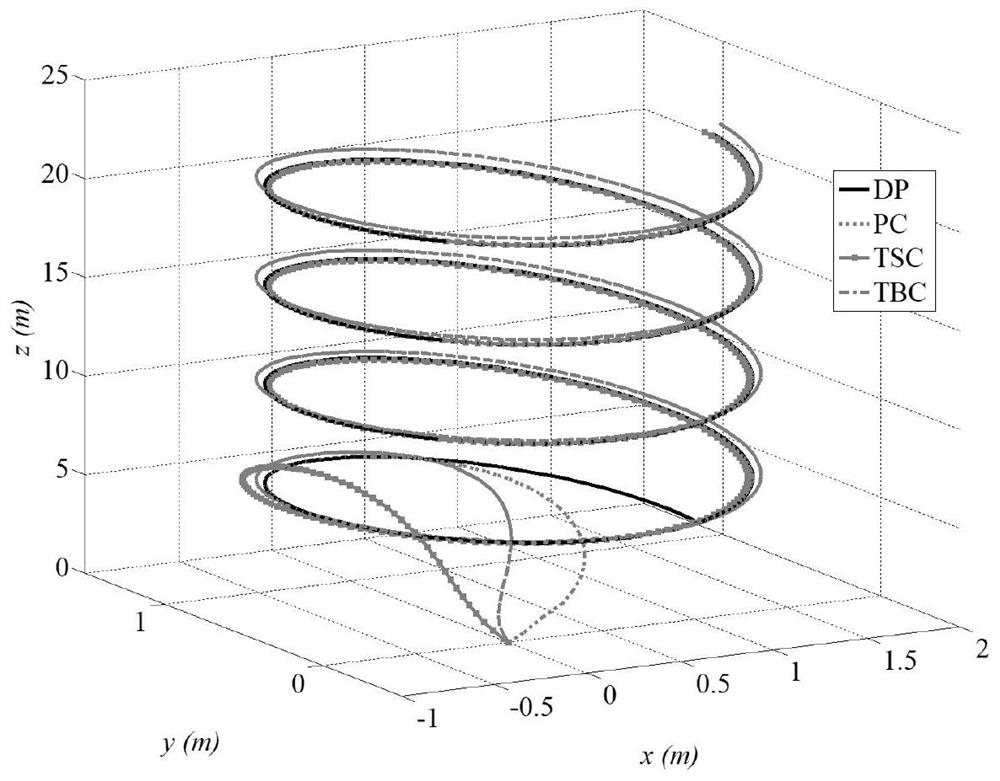
[0123] In this embodiment, starting from the requirements of the quadrotor UAV, combined with the motion characteristics of the quadrotor UAV, a simulation experiment is carried out on the adaptive robust trajectory tracking control method of the quadrotor UAV through MATLAB. The expected value of the trajectory tracking of the quadrotor UAV is set to [x d the y d z d ψ d ]=[cos0.5t sin0.5t 0.4t+5 cost], the initial values of attitude and position are set to [x y z φ θ ψ]=[0 0 0 0.02 0.02 0].
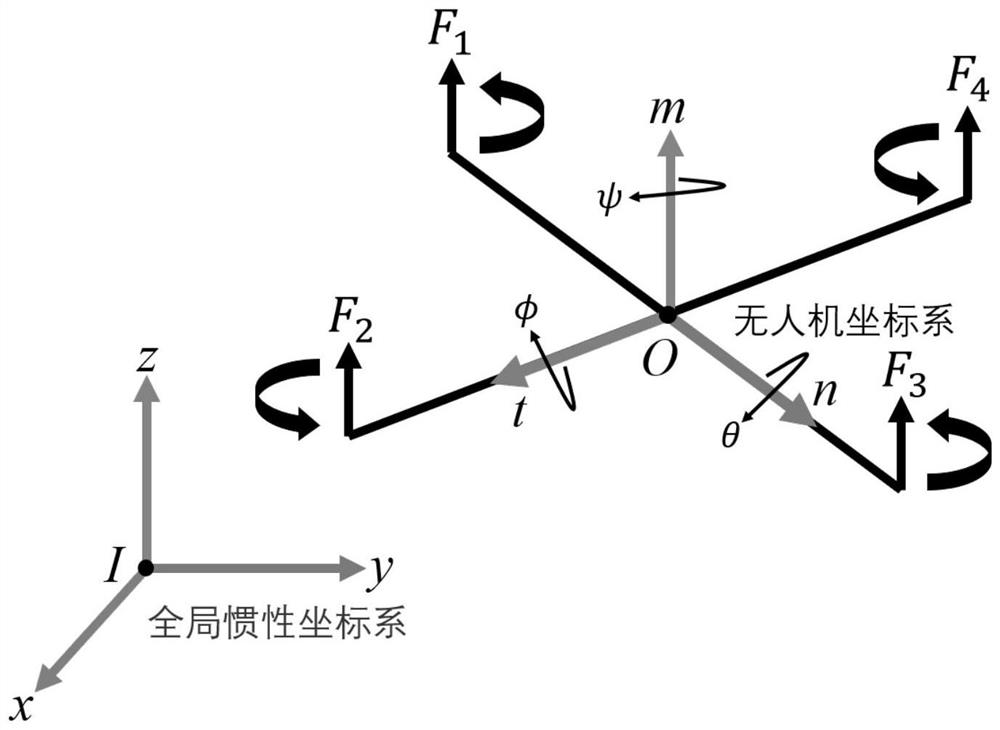
[0124] Step 1: According to the structure and motion charact...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More