

Unmanned aerial vehicle sensing system based on three-dimensional vision
A technology of perception system and 3D vision, applied in control/adjustment system, 3D position/channel control, non-electric variable control and other directions, can solve the complex processing process, the difficulty of real-time processing by the airborne embedded processor, and the loss of 3D information. and other problems, to achieve the effect of low algorithm complexity, high real-time performance and good feasibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
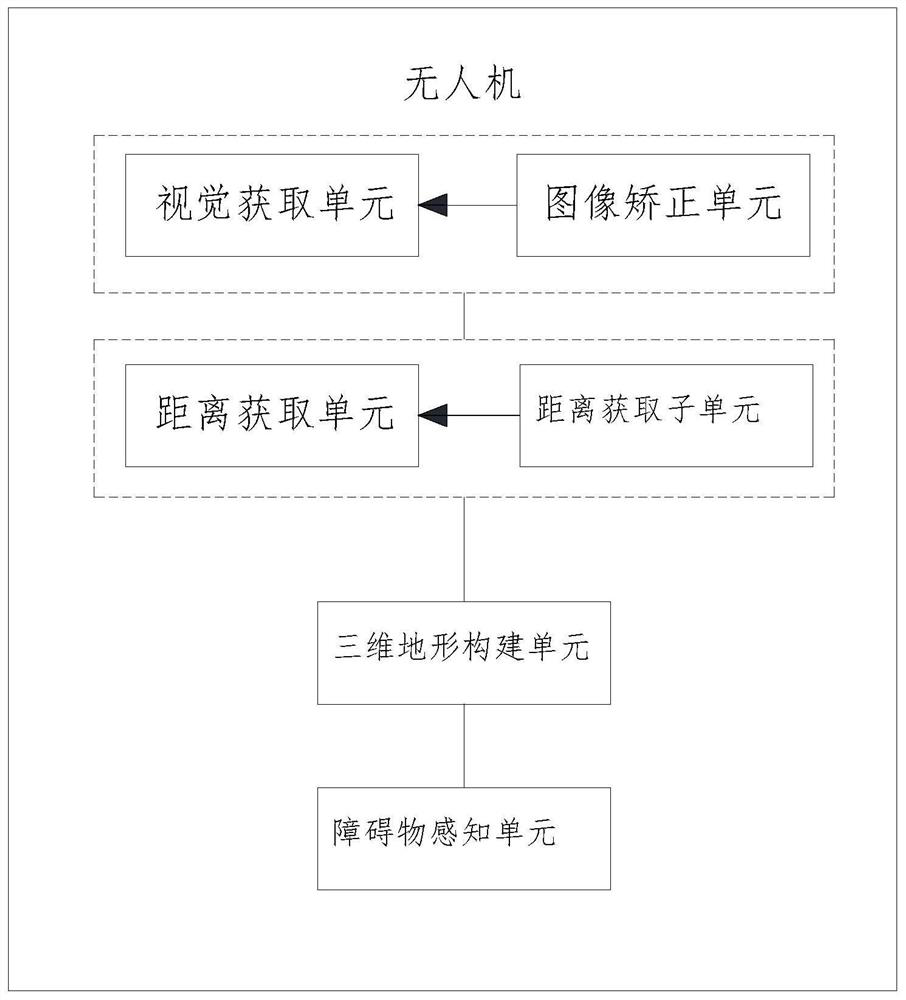
[0018] Such as figure 1 As shown, the UAV perception system based on three-dimensional vision of the present invention includes: a vision acquisition unit, which is used for the vision system of the UAV to obtain the image information of the UAV flight environment, and the acquired image The information is processed to obtain the image information of the obstacle;
[0019] The distance acquisition unit is used for the circular sensor of the drone to acquire the distance information from the drone to the obstacle;
[0020] The three-dimensional terrain construction unit uses the image information obtained by the visual acquisition unit to construct the depth channel of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More