

Unmanned aerial vehicle autonomous obstacle detection system and method based on binocular vision
A binocular vision system and obstacle detection technology, applied in signal transmission systems, instruments, three-dimensional position/channel control, etc., can solve the problems of small size, low weight, low power, etc., achieve low power consumption, low The effect of weight and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
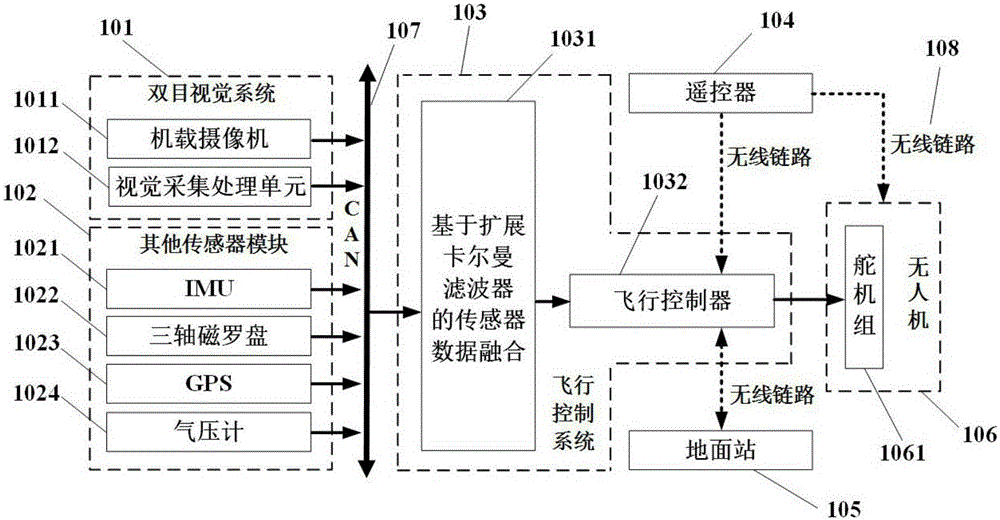
[0052] A UAV autonomous obstacle detection system based on binocular vision, such as figure 1 shown, including:
[0053] Binocular vision system (101): comprises two airborne cameras (1011) and visual acquisition processing unit (1012), and described two airborne cameras (1011) obtain the environmental visual information of UAV (106), and will The data is sent to the visual acquisition processing unit (1012), and the visual acquisition processing unit (1012) understands and analyzes the visual information, finally obtains the environmental information, and judges and gives obstacle information at the same time, and the obstacle information is passed through the CAN bus (107) sent to the flight control system (103).
[0054] Other sensor units (102): including an inertial measurement unit IMU (1021), a global positioning system GPS (1022), a magne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More