

Magnetic adsorption crawler-type wall-climbing robot
A wall-climbing robot and crawler-type technology, applied in the field of robots, can solve the problems of low efficiency, inability to adapt to wall crawling in a narrow space, and uneconomical
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
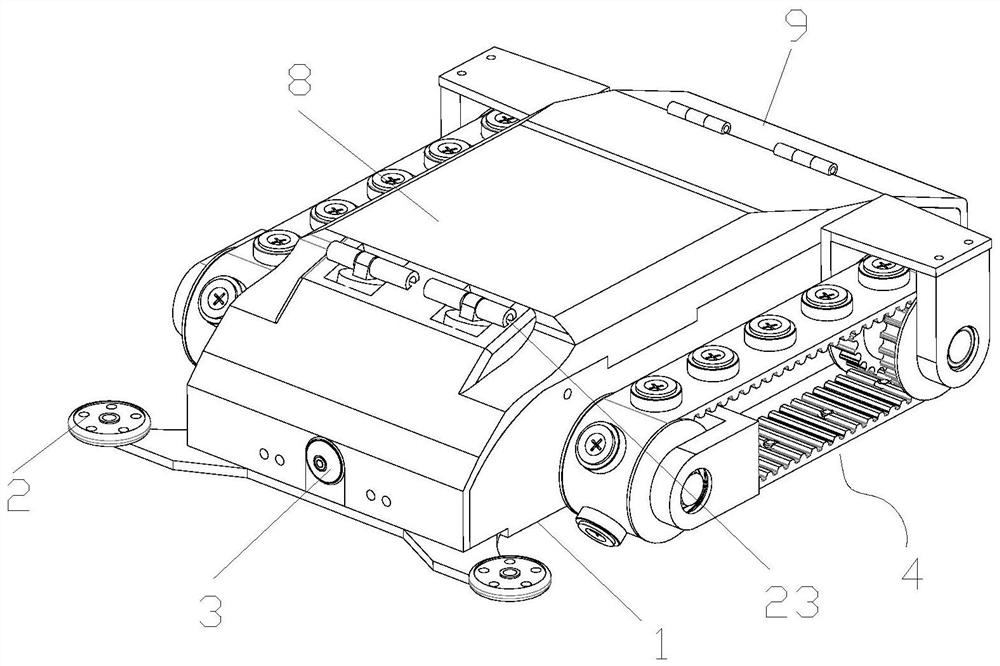
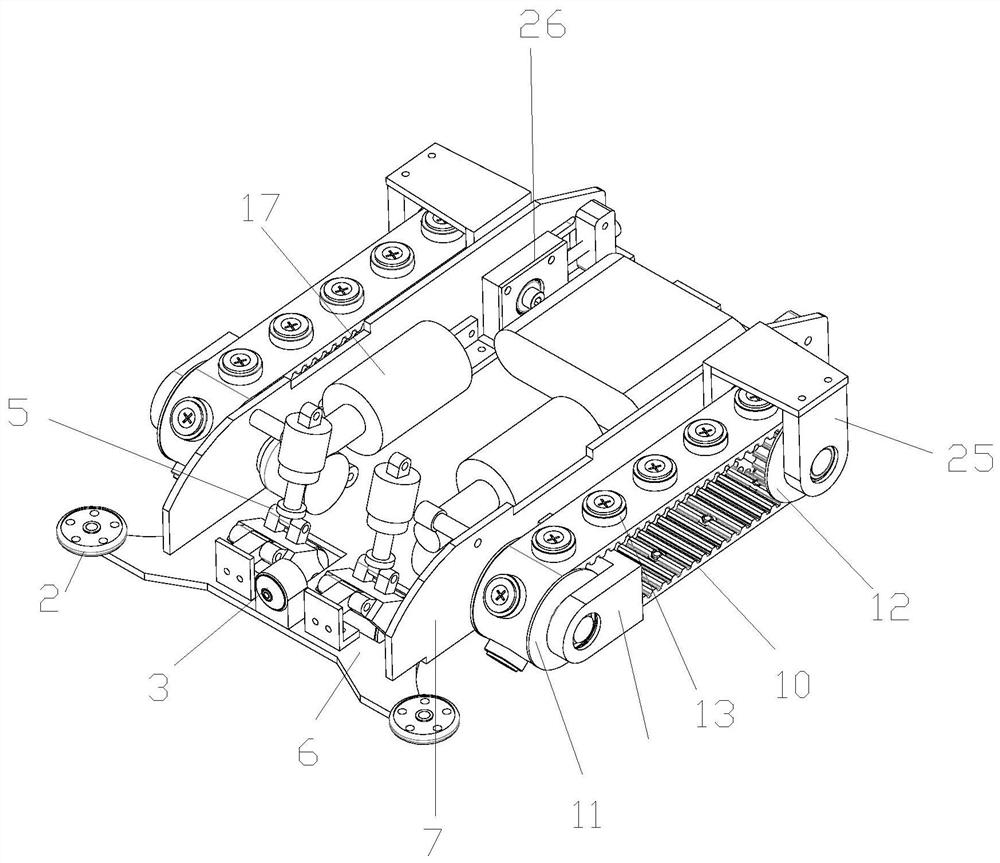
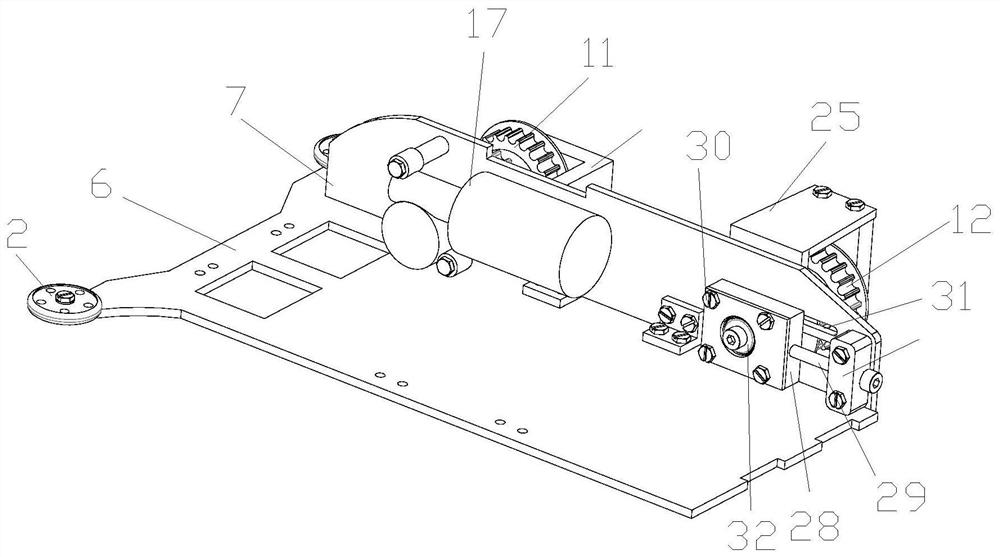
[0038] see Figure 1 to Figure 9 , this embodiment discloses a magnetic adsorption crawler-type wall-climbing robot, which includes a support frame 1, and the left and right sides of the front end of the support frame 1 are respectively provided with rotatable steering wheels 2, and the two steering wheels 2 are forward and outward respectively. Protruding out of the supporting vehicle frame 1, a camera 3 is provided in the middle part of the front end of the supporting vehicle frame 1. The left and right sides of the support frame 1 are respectively provided with a set of magnetic adsorption crawler-type movement...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More