

Multi-agent centralized region coverage method and system based on global environment prediction
A technology of global environment and regional coverage, applied in wireless communication, electrical components, network planning, etc., can solve problems such as no effective solutions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The purpose, technical solution and advantages of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0067] Existing multi-agent system task area coverage control methods mainly adopt the distributed coverage control method based on Voronoi partition. The current methods of this kind are almost all based on the assumption that the task environment density function is known, which is obviously unreasonable, so there are certain problems in the practicality of this kind of coverage control method.
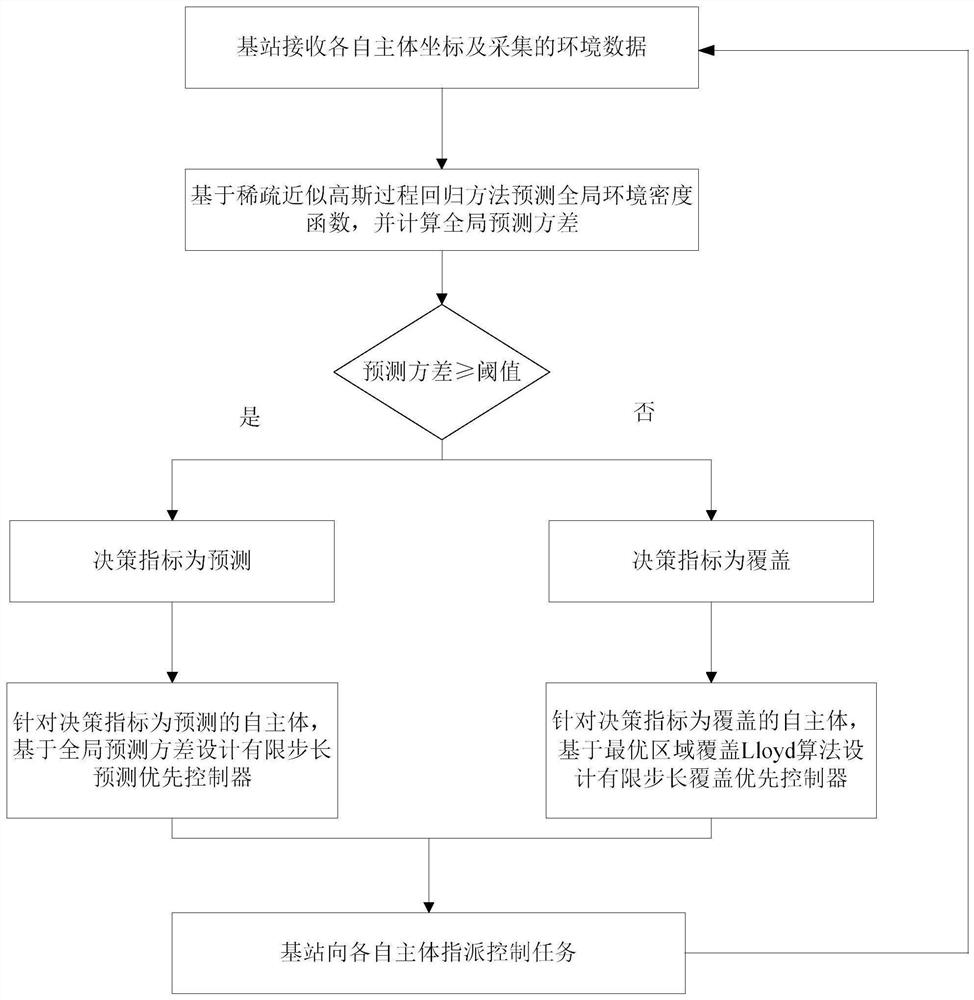
[0068] Based on the above considerations, the embodiment of the present invention discloses a multi-agent centralized area coverage method based on global environment prediction. The base station receives the coordinates of the respective agents and the collected environmental data, and predicts the global environment density based on a sparse approximate Gaussian process regression method. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More