Wheel-track combined wall-climbing robot
A wall-climbing robot and wheel-tracking technology, applied in the field of wall-climbing robots, can solve the problems of large steering resistance, small magnetic adsorption force, and large walking resistance of wall-climbing robots with magnetic crawler tracks, and achieve the effect of flexible and efficient welding tasks.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Below according to the accompanying drawings Figure 1 to Figure 5 , give a preferred embodiment of the present invention, and give a detailed description, so that the functions and characteristics of the present invention can be better understood.
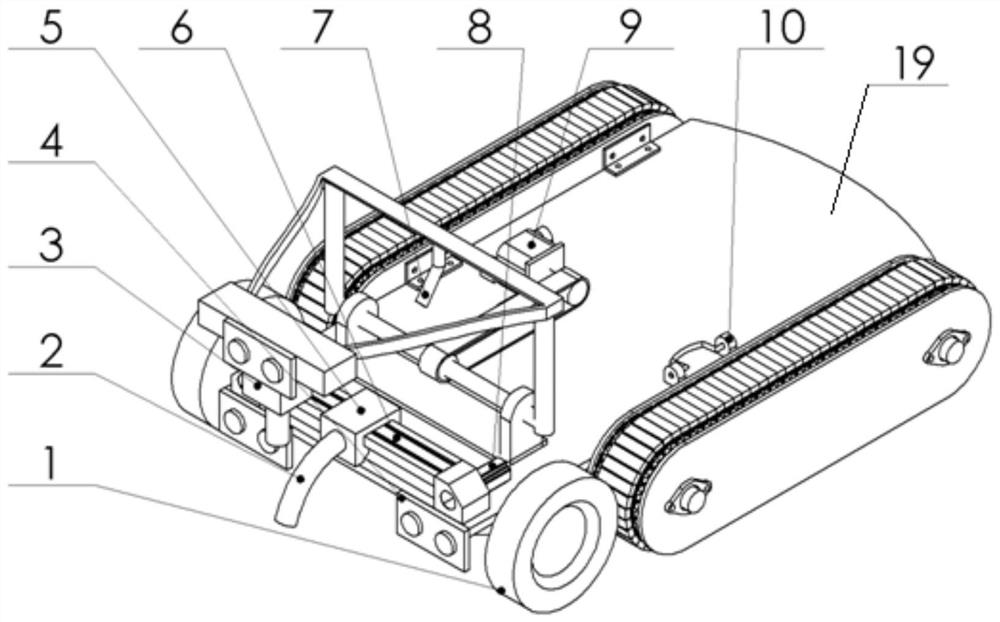
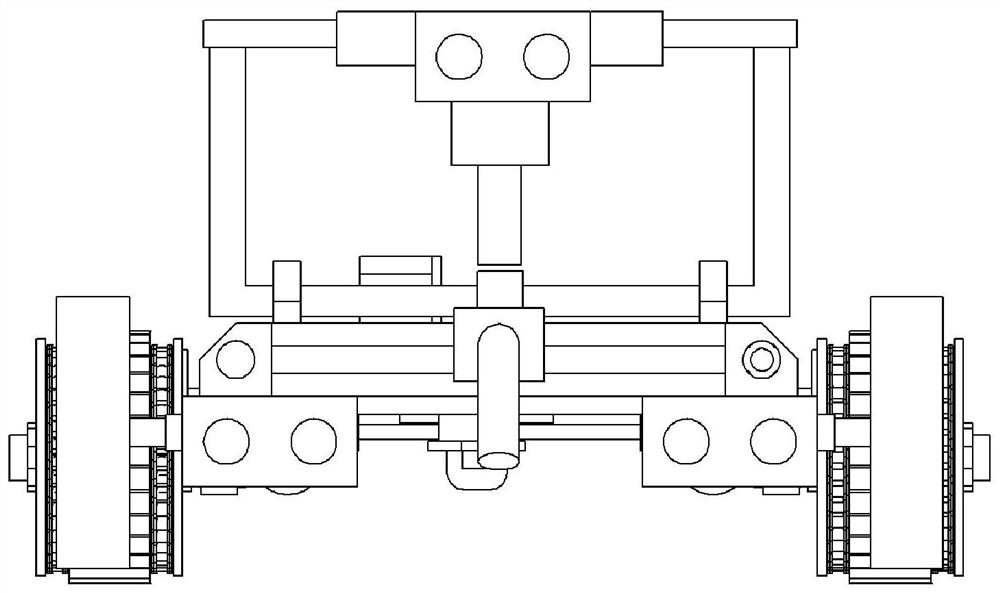
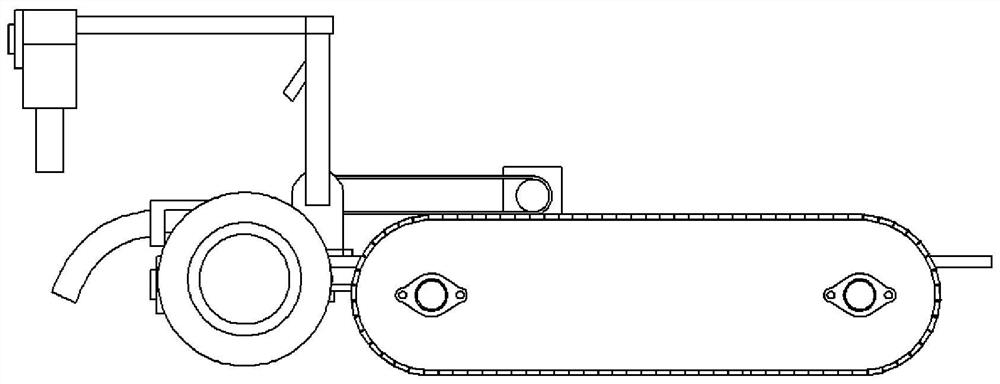
[0025] see Figure 1 to Figure 5 , a wall-climbing robot combined with wheels and shoes according to an embodiment of the present invention includes a vehicle frame 19, two rubber wheels 1, a steering adjustment mechanism, two electromagnetic adsorption crawler mechanisms, a welding torch 2, a welding torch transmission mechanism, and a camera Bracket assembly, a CCD camera 3, a crosshair laser marking device 7, an ultrasonic obstacle avoidance sensor 4 and a PLC controller; the rubber wheel 1 is connected to both sides of the front end of the vehicle frame 19 through a universal joint, and the steering adjustment mechanism is connected between the rubber wheel 1 and the vehicle frame 19; the electromagnetic adsorption cra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More