

Unmanned aerial vehicle multi-scale target detection and identification method
A target detection and recognition method technology, which is applied in the field of target detection, can solve the problems of small target detection difficulty and small calculation amount of recognition rate, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
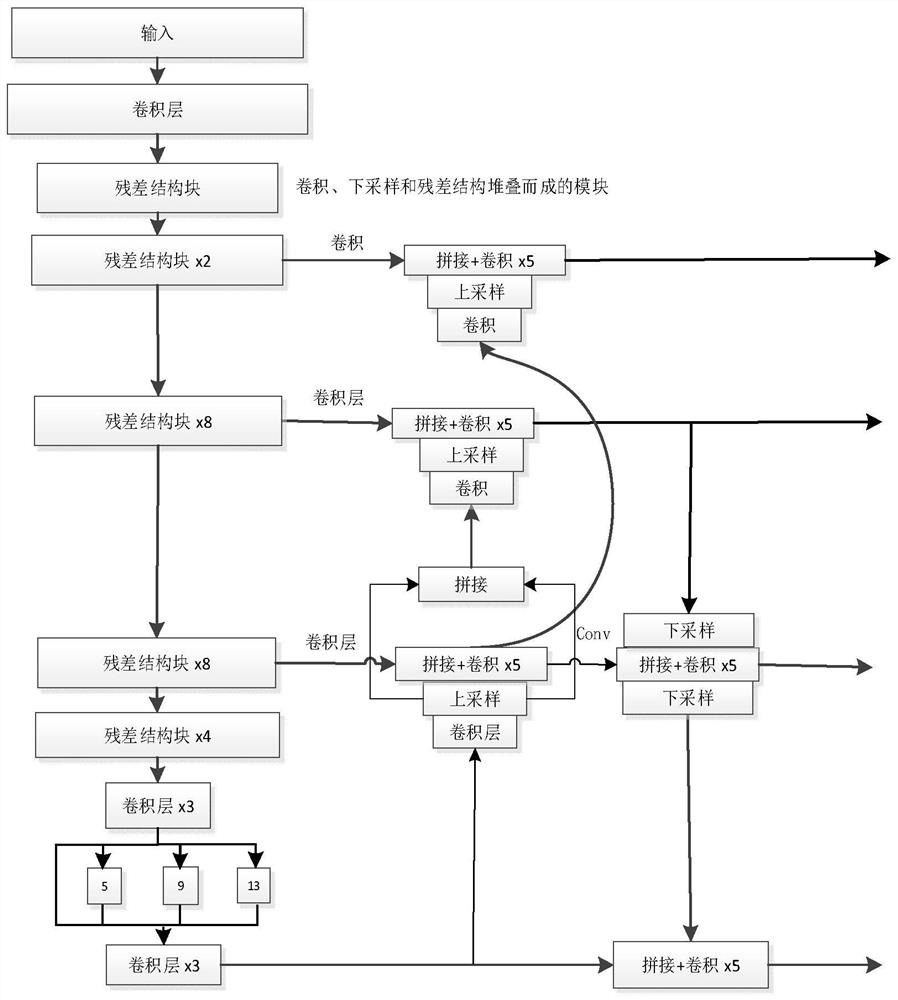
[0021] refer to Figure 1-Figure 3 . According to the present invention, the real-time target detection and recognition network model is composed of three parts: the backbone structure that extracts different scale features, the network neck Neck and the network detection head Head, and the improved target detection Neck module is embedded in the backbone structure network and the network detection head Between; the backbone structure network uses the YOLOv4 feature extraction network CSPDarknet53 network structure to extract features from the input image, and uses the improved two-branch pyramid attention module PANet structure to connect low-level features and high-level feature layers; the improved two-branch pyramid attention module PANet The structure uses a parallel strategy to reduce the number of convolutional layers traversed while increasing the feature input; the network detection head uses the detection head in the target detection model YOLOv3 of the end-to-end re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More