Automobile active suspension H-infinity switching control method based on T-S fuzzy model
A fuzzy model, active suspension technology, applied in suspension, elastic suspension, motor vehicles, etc., can solve problems such as poor control effect and insufficient H∞ control performance, and achieve improved safety, comfort and safety. , the effect of improving the response speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
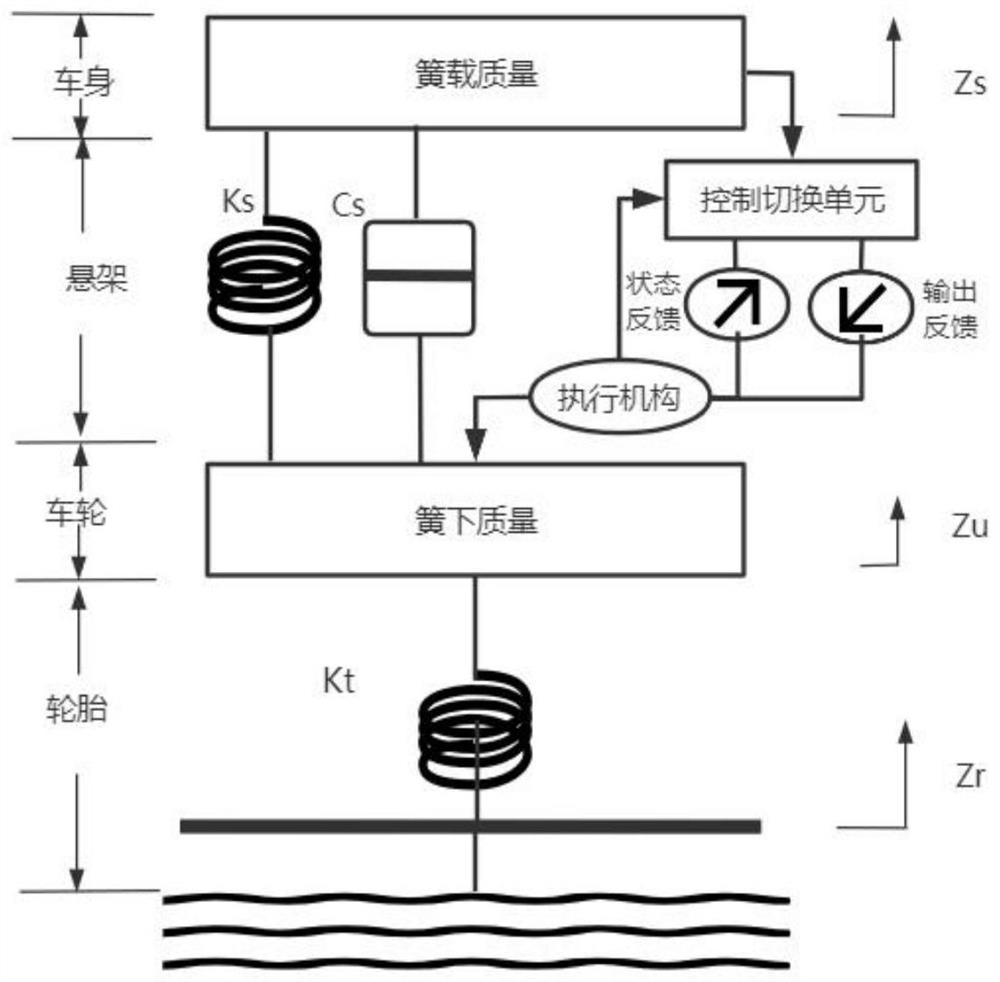
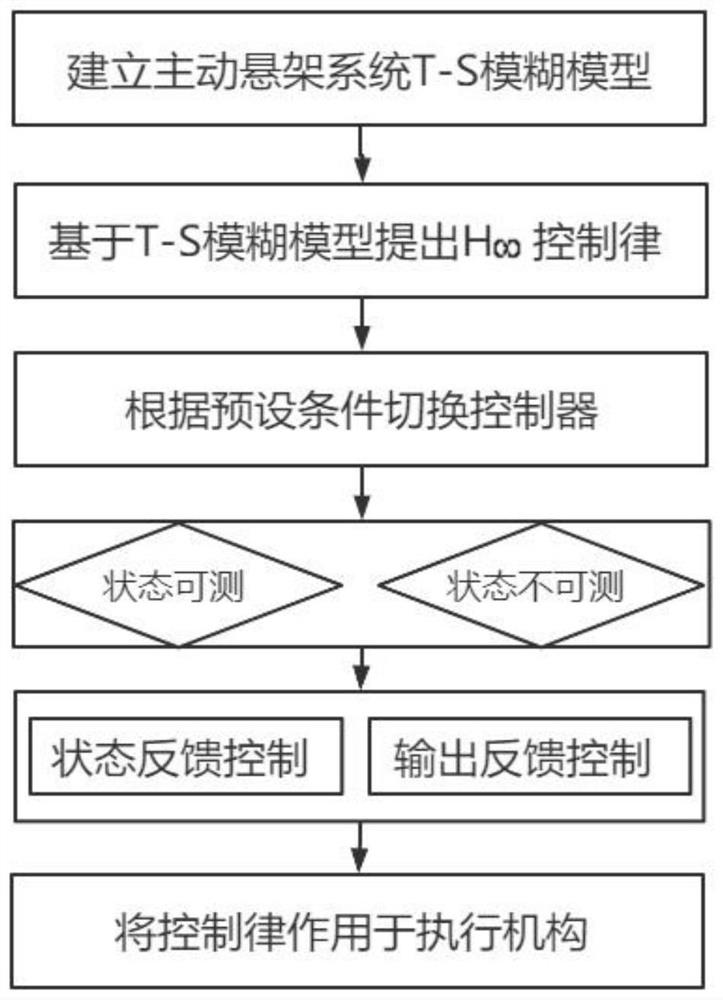
[0070] Embodiment 1: as figure 1 , 2 , as shown, the core of the present invention is to provide a kind of H∞ switching control method of automobile active suspension based on T-S fuzzy model, this method utilizes the local linear processing advantage of T-S fuzzy model, complex nonlinear system is converted into linear system, The control process is greatly simplified; at the same time, a state feedback and output feedback control switching mechanism is proposed, so that the active suspension can have better performance in complex road conditions.
[0071] Step 1: The process of establishing the active suspension t-s model is as follows: According to Newton's second law, the following expression is derived
[0072]
[0073] where m s Spring load mass, m u is the unsprung mass (tyres, wheels, brake calipers, suspension linkages, etc.), u is the active control force of the actuator. k s and c s are the stiffness and damping of the suspension spring, respectively, k t ...
Embodiment 2
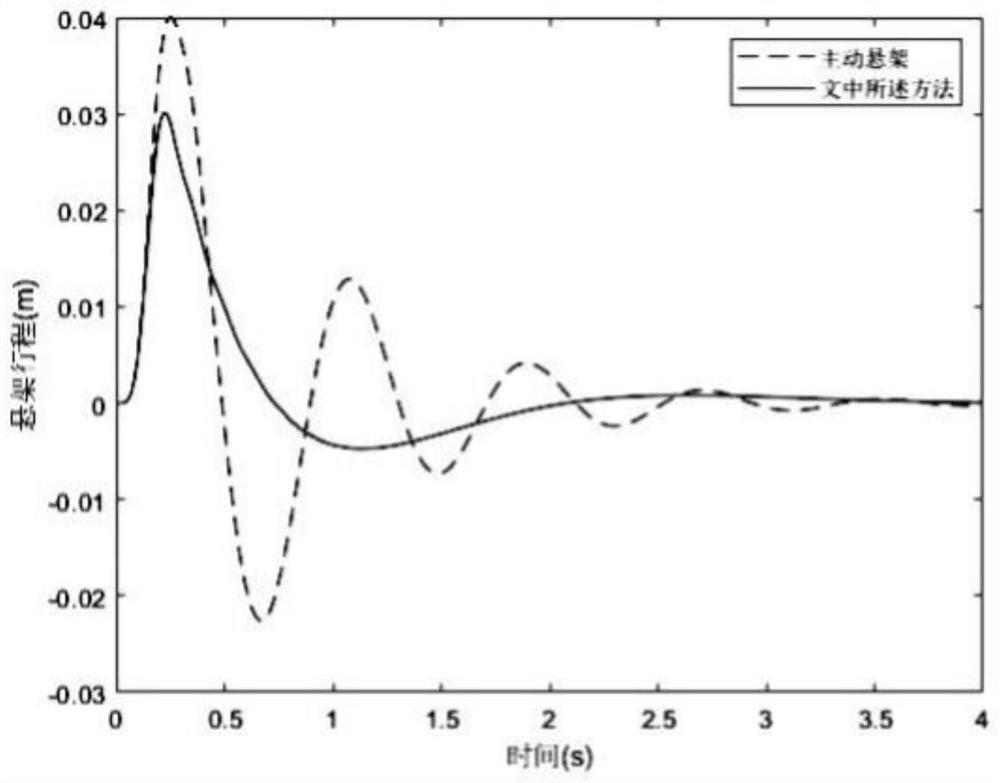
[0113] Embodiment 2: Taking the active suspension of a vehicle as an example, the following values are selected:
[0114] m s =350kg,m u =120kg,k s =25000N / m,c s =900N / m,k t =210000N / m,c t =120N / m,z max= 0.2m. The parameter matrix of the system is obtained as follows:
[0115] B 1 =[0 -1 0 1] T ,
[0116] C 1 =[-71.4 0 -2.5 2.5] T ,
[0117] Assuming that the state of the suspension system is measurable, the switching controller will switch to state feedback control, and the required controller is obtained by the following steps:
[0118] Construct the LMI as follows:
[0119]
[0120] Set constant matrix in toolbox
[0121] A=[0,0,1,-1; 0,0,0,1;-71.4,0,-2.6,2.6;208,-1750,7.5,-6.5];
[0122] B = [0; 0; 1 / 350; -1 / 120];
[0123] B1=[0;-1;0;1];
[0124] C1 = [-71.4; 0; -2.5; 2.5];
[0125] D1=1 / 350;
[0126] set matrix variables
[0127] setlmis([])
[0128] X = lmivar(1,[4,1]);
[0129] Y=lmivar(1,[4,1]);
[0130] Q = lmivar(1,[4,1]);
[0131]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com