
Eureka
For R&D, Eureka makes reading and utilizing patents & technical documents easy.
Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Navigation method, device and system of flying body
A navigation method and flying body technology, applied in the field of computer navigation, can solve problems such as poor real-time performance, and achieve the effect of solving poor real-time performance and improving real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
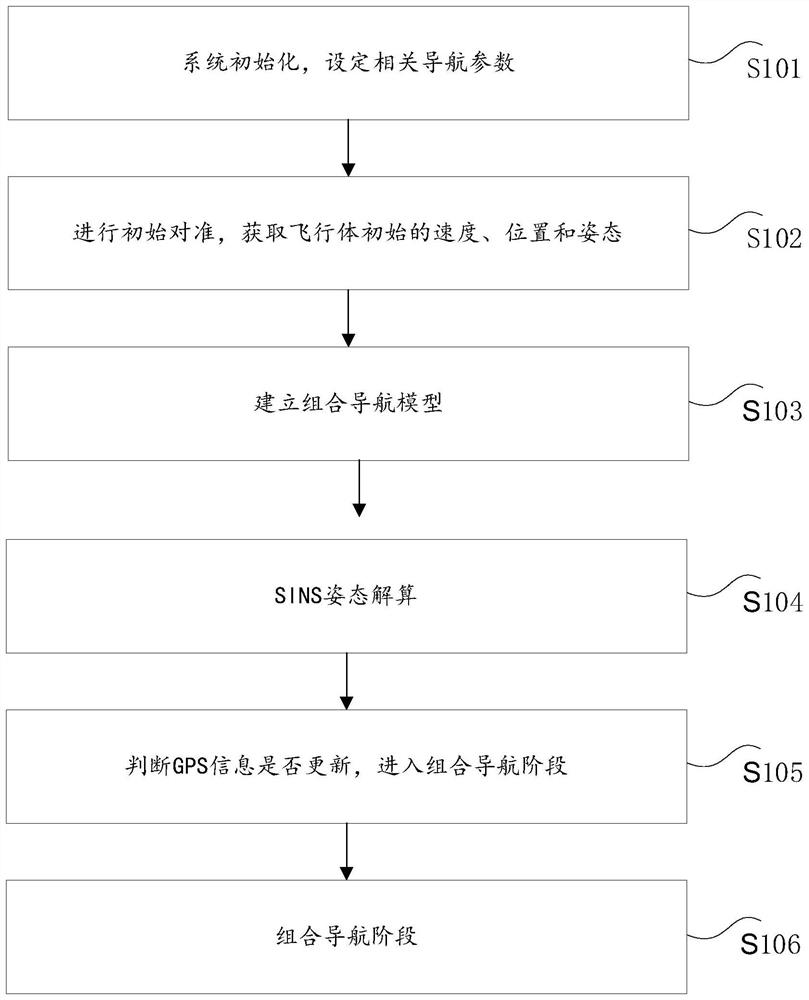
[0022] According to an embodiment of the present invention, a flow chart of an AEKF (adaptive Kalman filter algorithm) based high-speed spinning flying object integrated navigation method is provided, such as figure 1 As shown, the method includes:
[0023] Step S101, system initialization, setting relevant navigation parameters.
[0024] Step S102, perform initial alignment, and obtain the initial velocity, position and attitude of the flying object.
[0025] Step S103, establishing a combined navigation model.
[0026] 1) State volume construction
[0027] In order to improve the real-time performance of the integrated navigation, the linear model is obtained by using the Taylor series expansion of the nonlinear functions of the system equation and the measurement equation and only retaining the linear items.
[0028] Different from the traditional EKF (Extended Kalman Filter) modeling method, it can avoid calculating the Jacobian matrix every time, and directly select th...
Embodiment 2
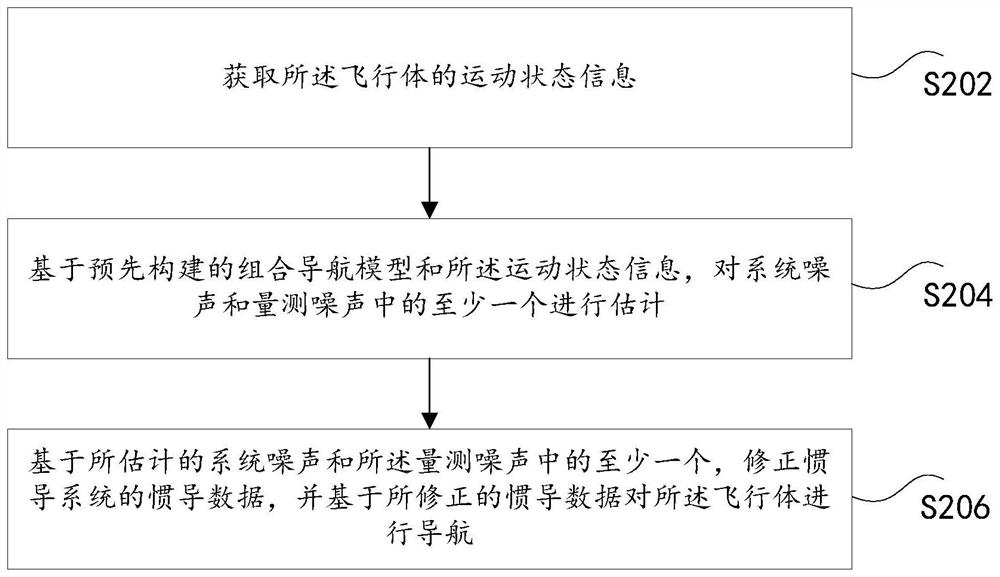
[0074] According to an embodiment of the present invention, a flow chart of another flying object navigation method is provided, such as figure 2 As shown, the method includes:
[0075] Step S202, acquiring motion state information of the flying object.
[0076] For example, the speed, attitude, and position information of the flying object are obtained through the GPS system, and / or the speed, attitude, and position information of the flying object are obtained through the inertial navigation system.
[0077] Step S204, estimating at least one of system noise and measurement noise based on the pre-built integrated navigation model and the motion state information.
[0078] Wherein, the integrated navigation model is constructed by the following methods: constructing the state quantity based on the error quantity of the inertial navigation system; constructing the observation quantity based on the measurement parameters of the GPS system.
[0079] In an exemplary embodiment...
Embodiment 3
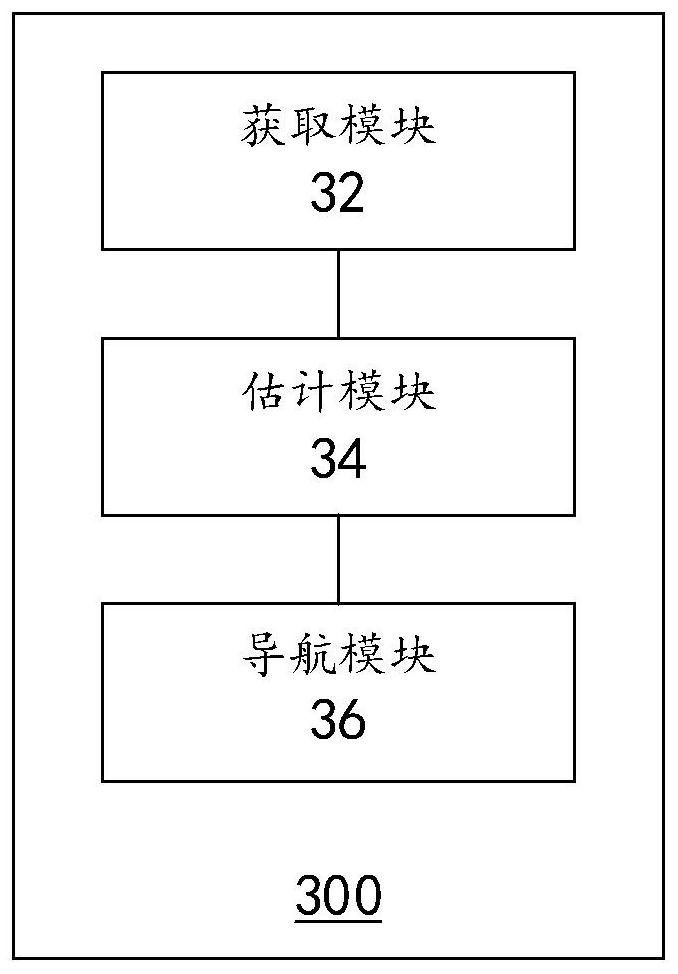
[0083] According to an embodiment of the present disclosure, a navigation device for implementing the methods in Embodiment 1 and Embodiment 2 above is also provided, such as image 3 As shown, the navigation device 300 includes:
[0084] The obtaining module 32 is configured to obtain the motion state information of the flying object.
[0085] The estimation module 34 is configured to estimate at least one of system noise and measurement noise based on the pre-built integrated navigation model and the motion state information;
[0086] The navigation module 36 is configured to correct the inertial navigation data of the inertial navigation system based on at least one of the estimated system noise and the measurement noise, and navigate the flying object based on the corrected inertial navigation data.
[0087] In one embodiment of the present disclosure, the navigation device 300 further includes a model building module, configured to construct a state quantity based on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com