Flexible drive knee joint exoskeleton
An exoskeleton and knee joint technology, applied in the field of robotics, can solve problems such as the misalignment of the rotation centers of the human-machine knee joint, and achieve the effects of reducing the required torque, high energy density, and stable force output
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
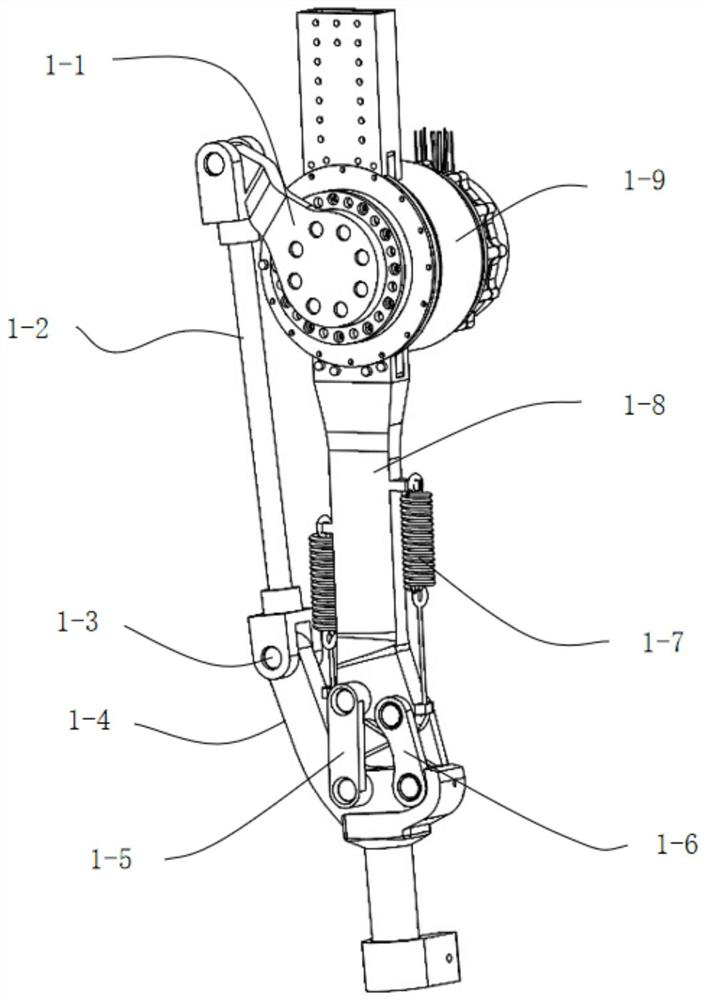
[0026] The present invention is a flexible drive knee exoskeleton, such as figure 1 As shown, it includes an exoskeleton body, parallel springs 1-7 and serial elastic drivers 1-9.
[0027] The body part of the exoskeleton includes an output rod 1-1, a transmission connecting rod 1-2 and a multi-linkage mechanism, which are connected to each other through the knee coronal shaft 1-3 to form a rotary pair connection, and the axes of each rotary pair are parallel. The multi-link mechanism includes exoskeleton thigh links 1-8, long cranks 1-5, short cranks 1-6 and connecting rods 1-4, and each part is connected to each other through the coronal axis of the knee to form a revolving pair to form an instantaneous knee joint. Cardio-fitting four-bar linkage.
[0028] The specific connection method of the above-mentioned exoskeleton body is as follows:
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com